Principe de fonctionnement du moteur à courant continu à excitation indépendante. Caractéristiques mécaniques et méthodes de contrôle de la vitesse des moteurs à courant continu à excitation série et mixte
Bonne journée, chers lecteurs ! Dans cet article, je vais parler de ce qu'est l'excitation dans les moteurs. courant continu et "avec ce qu'on mange".
Probablement, chacun de nous dans l'enfance avait des jouets à entraînement électrique. Les curieux de ces années-là n'ont pas manqué l'occasion de démonter ces jouets pour voir ce qu'il y avait à l'intérieur.
En regardant à l'intérieur d'un tel jouet, nous avons trouvé un petit moteur électrique à courant continu. Naturellement, nous n'avons même pas réfléchi à la raison pour laquelle cela fonctionne. Certains d'entre nous, ayant trouvé un moteur dans le jouet, ont également osé le démonter. Ces camarades curieux, ayant démonté le moteur, y trouvèrent un aimant permanent (parfois plus d'un), des balais et une ancre avec un collecteur.
Ainsi, un aimant permanent est le système d'excitation le plus simple pour les moteurs à courant continu. Après tout, l'armature du moteur ne tourne que lorsqu'elle est entourée d'un champ magnétique constant, créé à l'aide d'un aimant permanent.
Les moteurs à courant continu à l'échelle commerciale utilisent des enroulements spéciaux comme excitateurs, appelés enroulements de champ.
La connexion de ces enroulements peut être très différente. Ils peuvent être connectés en parallèle avec l'armature, en série avec elle, en mélange et même indépendamment d'eux.
Soit dit en passant, les moteurs qui ont un aimant permanent comme excitateur sont considérés comme des dispositifs excités indépendamment.
L'enroulement d'excitation se compose d'un nombre de spires nettement plus important que l'enroulement d'induit. À cet égard, le courant de l'enroulement d'induit est des dizaines de fois supérieur au courant de l'excitateur. La vitesse de rotation d'un tel moteur peut varier en fonction de la charge et Flux magnétique... Grâce aux propriétés de connexion, les moteurs connexion parallèle assez sujet aux changements de vitesse.
Nous allons maintenant considérer l'option d'une connexion séparée des enroulements de travail et d'excitation. Un tel moteur est appelé moteur à excitation indépendant. La vitesse d'un tel moteur peut être ajustée en changeant la résistance Chaîne d'ancrage ou flux magnétique.
Il y a ici une petite nuance: ne réduisez pas trop le courant d'excitation lorsque le moteur est allumé de cette manière, car cela entraîne une très forte augmentation du courant d'induit. La même chose est dangereuse et un circuit ouvert de l'excitation de ces moteurs. De plus, si la charge du moteur avec une telle inclusion est faible, ou lorsqu'il est allumé au ralenti, une accélération si forte peut se produire qu'il y a un danger pour le moteur.
Comme je l'ai dit, une sorte de DPT excitation indépendante les dispositifs qui ont des aimants permanents comme excitateur sont considérés. Je dirai aussi quelques mots à leur sujet.
Étant donné que les moteurs à courant continu et les machines de type synchrone peuvent utiliser des aimants permanents au lieu d'excitateurs, cette option est considérée comme assez attrayante. Et c'est pourquoi:
- un tel dispositif a une consommation de courant réduite en raison d'une diminution du nombre d'enroulements, de sorte que les indicateurs de telles machines, tels que l'efficacité, sont plus élevés;
- avec l'utilisation d'aimants permanents à la place de l'excitatrice, la conception des circuits d'excitation du moteur est simplifiée, ce qui augmente sa fiabilité, car l'aimant permanent ne nécessite pas d'alimentation, par conséquent, un tel moteur n'a pas d'unité de collecte de courant sur le rotor.
Parlons maintenant de la connexion en série des enroulements (moteurs à excitation série).
Dans cette option de connexion, le courant d'induit sera également excitant. Cela provoque une forte variation du flux magnétique en fonction de la charge. C'est la raison de la grande indésirabilité de les démarrer au ralenti et à faible charge.
L'application a trouvé une telle inclusion lorsqu'un moment de démarrage important est requis, ou la capacité de résister à des surcharges à court terme. À cet égard, ils sont utilisés comme moyen de traction pour les tramways, les trolleybus, les locomotives électriques, les métros et les grues. De plus, ils sont utilisés comme moyen de démarrage pour les moteurs à combustion interne (comme démarreurs).
La dernière option pour allumer les moteurs à courant continu est leur inclusion mixte. Chacun des pôles de ces moteurs est équipé d'une paire de bobinages, l'un en parallèle et l'autre en série. Ils peuvent être connectés de deux manières :
- méthode des consonnes (dans ce cas, les courants sont additionnés);
- option compteur (soustraction des courants).
Ainsi, selon l'option de raccordement (qui modifie également le rapport des flux magnétiques), un tel moteur peut être proche soit d'un dispositif à excitation série, soit d'un moteur à excitation parallèle.
Dans la plupart des cas, ils considèrent l'enroulement série comme l'enroulement principal et l'enroulement auxiliaire en parallèle. En raison de l'enroulement parallèle de ces moteurs, la vitesse n'augmente pratiquement pas à faible charge.
Si un couple de démarrage important est requis et la possibilité de réguler la vitesse sur des charges variables, une connexion conforme est utilisée. La connexion inverse est utilisée lorsqu'il est nécessaire d'obtenir une vitesse constante avec une charge variable.
S'il devient nécessaire d'inverser le DCT (changer le sens de sa rotation), changez le sens du courant dans l'un de ses enroulements de travail.
En changeant la polarité de connexion des bornes du moteur, il est possible de changer le sens uniquement des moteurs allumés selon un circuit indépendant, ou des moteurs avec un aimant permanent comme excitatrice. Dans tous les autres appareils, il est nécessaire de changer le sens du courant dans l'un des enroulements de travail.
De plus, les moteurs à courant continu ne peuvent pas être mis en marche par la méthode de connexion à pleine tension. Cela est dû au fait que la valeur de leur courant de démarrage est environ 2 douzaines de fois supérieure à la valeur nominale (cela dépend de la taille et de la vitesse du moteur). Les courants de démarrage des gros moteurs peuvent même dépasser de cinquante fois leur courant nominal de fonctionnement.
Des courants importants peuvent provoquer l'effet d'un arc de cercle du collecteur, à la suite duquel le collecteur est détruit.
Pour allumer le DPT, on utilise la technique, soit l'utilisation de rhéostats de démarrage. L'inclusion du type direct n'est possible qu'à basse tension et pour les petits moteurs avec une résistance élevée de l'enroulement d'induit.
Ecrire des commentaires, des ajouts à l'article, j'ai peut-être raté quelque chose. Jetez un oeil à, je serai heureux si vous trouvez quelque chose d'autre utile sur mon site. Tous mes vœux.
La première de toutes les machines électriques tournantes inventées au 19ème siècle est le moteur à courant continu. Son principe de fonctionnement est connu depuis le milieu du siècle dernier, et jusqu'à présent, les moteurs à courant continu (moteurs à courant continu) continuent de servir fidèlement une personne, mettant en mouvement de nombreuses machines et mécanismes utiles.
Premier DPT
Depuis les années 30 du 19ème siècle, ils ont traversé plusieurs étapes dans leur développement. Le fait est qu'avant l'apparition des machines-outils à la fin du siècle dernier, la seule source d'électricité était une cellule galvanique. Par conséquent, tous les premiers moteurs électriques ne pouvaient fonctionner qu'en courant continu.
Quel a été le premier moteur à courant continu ? Le principe de fonctionnement et le dispositif des moteurs construits dans la première moitié du XIXe siècle étaient les suivants. Un inducteur à pôle explicite était un ensemble d'aimants permanents stationnaires ou d'électro-aimants en barre qui n'avaient pas de circuit magnétique fermé commun. L'armature polaire explicite était formée de plusieurs électro-aimants à tige séparés sur axe commun entraînés en rotation par les forces de répulsion et d'attraction des pôles de l'inducteur. Leurs représentants typiques étaient les moteurs U. Ricci (1833) et B. Jacobi (1834), équipés de commutateurs de courant mécaniques dans des électro-aimants d'induit avec des contacts mobiles dans le circuit d'enroulement d'induit.
Comment fonctionnait le moteur Jacobi
Quel était le principe de cette machine ? Le moteur à courant continu Jacobi et ses analogues avaient un moment électromagnétique pulsé. Pendant que les pôles opposés de l'induit et de l'inducteur se rapprochaient, sous l'influence de la force magnétique d'attraction, le moment du moteur atteignit rapidement un maximum. Puis, avec la position des pôles de l'induit en face des pôles de l'inducteur, l'interrupteur mécanique a interrompu le courant dans les électro-aimants de l'induit. Le moment est tombé à zéro. En raison de l'inertie de l'induit et du mécanisme entraîné, les pôles de l'induit sont sortis de sous les pôles de l'inducteur, à ce moment un courant de sens opposé leur a été fourni par l'interrupteur, leur polarité a également changé à l'opposé, et la force d'attraction au pôle le plus proche de l'inducteur a été remplacée par une force de répulsion. Ainsi, le moteur Jacobi tournait par à-coups successifs.
L'ancre de l'anneau apparaît
Dans les électro-aimants à tige de l'armature du moteur Jacobi, le courant était périodiquement coupé, le champ magnétique créé par eux disparaissait et son énergie était convertie en pertes de chaleur dans les enroulements. Ainsi, la conversion électromécanique de la puissance électrique de la source de courant d'induit ( pile galvanique) à mécanique s'y est produit avec des interruptions. Nous avions besoin d'un moteur avec un enroulement fermé continu, dans lequel le courant circulerait constamment pendant toute la durée de son fonctionnement.
Et un tel fuhtufn a été créé en 1860 par A. Pacinotti. En quoi son moteur à courant continu différait-il de ses prédécesseurs ? Le principe de fonctionnement et la structure du moteur Pacinotti sont les suivants. Comme point d'ancrage, il a utilisé un anneau d'acier avec des rayons fixés à un arbre vertical. En même temps, l'ancre n'avait pas de pôles prononcés. Il est devenu implicitement polarisé.
Les bobines d'enroulement d'ancre ont été enroulées entre les rayons de l'anneau, dont les extrémités étaient connectées en série sur l'armature elle-même, et des pointes ont été fabriquées à partir des points de connexion de chacune des deux bobines, connectées aux plaques collectrices situées le long de la circonférence en bas de l'arbre moteur, dont le nombre était égal au nombre de bobines. L'ensemble de l'enroulement d'induit était fermé sur lui-même et les points de connexion successifs de ses bobines étaient connectés à des plaques collectrices adjacentes, le long desquelles glissaient une paire de rouleaux d'alimentation en courant.
L'armature annulaire a été placée entre les pôles des deux électro-aimants fixes de l'inducteur du stator, de sorte que lignes de force créé par eux champ magnétique excitations sont entrées dans la surface cylindrique extérieure de l'induit du moteur sous pôle Nord excitations, passaient le long de l'ancre annulaire, sans pénétrer dans son ouverture intérieure, et émergeaient à l'extérieur sous le pôle sud. 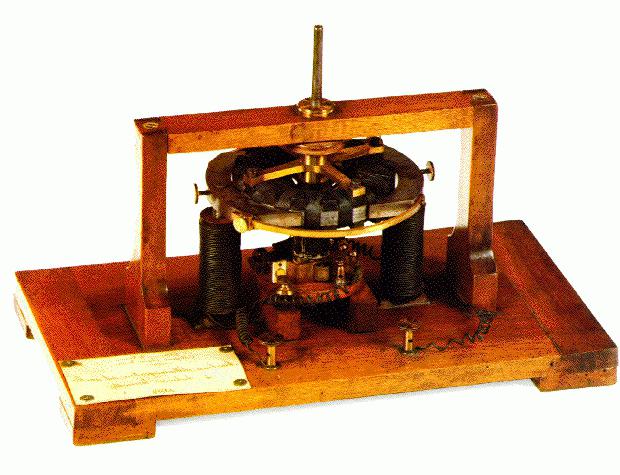
Comment fonctionnait le moteur Pacinotti
Quel était son principe de fonctionnement ? Le moteur à courant continu Pacinotti fonctionnait exactement de la même manière que les moteurs à courant continu modernes.
Dans le champ magnétique du pôle de l'inducteur avec une polarité donnée, il y avait toujours un certain nombre de conducteurs de l'enroulement d'induit avec un courant de direction constante, et la direction du courant d'induit sous différents pôles de l'inducteur était opposée . Ceci a été réalisé en plaçant les rouleaux d'alimentation en courant, qui jouent le rôle de balais, dans l'espace entre les pôles de l'inducteur. Par conséquent, le courant d'induit instantané circulait dans l'enroulement à travers le rouleau, la plaque collectrice et la dérivation qui lui était attachée, qui se trouvait également dans l'espace entre les pôles, puis circulait en sens inverse le long des deux demi-enroulements-branches, et s'écoulait finalement par la dérivation, la plaque collectrice et le rouleau dans l'autre intervalle de pôle à pôle. Dans ce cas, les bobines d'induit elles-mêmes sous les pôles de l'inducteur ont changé, mais y sont restées inchangées.
Pour chaque conducteur de la bobine d'induit avec courant, situé dans le champ magnétique du pôle de l'inducteur, une force a agi, dont la direction est déterminée par la règle bien connue de la "main gauche". Par rapport à l'axe du moteur, cette force a créé un couple, et la somme des moments de toutes ces forces donne le couple DCT total, qui est presque constant même avec plusieurs plaques collectrices.
DPT avec une armature annulaire et un enroulement grammovskaya
Comme cela s'est souvent produit dans l'histoire de la science et de la technologie, l'invention d'A. Pacinotti n'a pas trouvé d'application. Il a été oublié pendant 10 ans, jusqu'en 1870, il a été répété indépendamment par l'inventeur franco-allemand Z. Gramm dans une conception similaire. Dans ces machines, l'axe de rotation était déjà horizontal, des balais de charbon étaient utilisés, glissant le long des plaques collectrices de un design presque moderne. Dans les années 70 du 19ème siècle, le principe de réversibilité des machines électriques était déjà bien connu, et la machine Gram était utilisée comme générateur et moteur à courant continu. Son principe de fonctionnement a déjà été décrit ci-dessus.
Malgré le fait que l'invention de l'armature annulaire ait été une étape importante dans le développement du DCT, son enroulement (appelé Gramm) présentait un inconvénient important. Dans le champ magnétique des pôles de l'inducteur, il n'y avait que les conducteurs (appelés actifs) qui se trouvaient sous ces pôles sur la surface cylindrique extérieure de l'armature. C'était à eux que le couple de génération magnétique était appliqué par rapport à l'axe du moteur. Les mêmes conducteurs inactifs qui traversaient le trou de l'armature annulaire n'ont pas participé à la création du moment. Ils ne dissipaient inutilement de l'électricité que sous forme de déperdition thermique. 
De l'ancre annulaire au tambour
Le célèbre ingénieur électricien allemand F. Gefner-Alteneck a réussi à éliminer cet inconvénient de l'armature annulaire en 1873. Comment fonctionnait son moteur à courant continu ? Le principe de fonctionnement, la structure de son inductance-stator est la même que celle d'un moteur à enroulement annulaire. Mais la conception de l'armature et de son bobinage ont changé.
Gefner-Altenek a attiré l'attention sur le fait que la direction du courant d'induit circulant des balais fixes dans les conducteurs de l'enroulement de Gramm sous les pôles de champ adjacents est toujours opposée, c'est-à-dire ils peuvent être inclus dans les spires d'une bobine située sur la surface cylindrique extérieure avec une largeur (pas) égale à la division des pôles (partie de la circonférence de l'induit par pôle de champ).
Dans ce cas, le trou dans l'armature annulaire devient inutile et il se transforme en un cylindre plein (tambour). Cet enroulement et l'armature elle-même sont appelés tambour. La consommation de cuivre en elle à le même numéro il y a beaucoup moins de conducteurs actifs que dans un bobinage Gram. 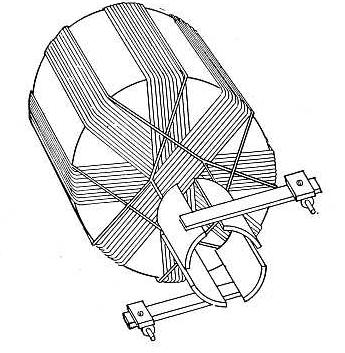
L'ancre devient déchiquetée
Dans les machines de Gramm et de Gefner-Alteneck, la surface de l'armature était lisse et les conducteurs de son enroulement étaient situés dans l'espace entre elle et les pôles de l'inducteur. Dans ce cas, la distance entre la surface cylindrique concave du pôle d'excitation et la surface convexe de l'armature atteint plusieurs millimètres. Par conséquent, pour créer l'amplitude requise du champ magnétique, il était nécessaire d'utiliser des bobines d'excitation avec une grande force magnétomotrice (avec un grand nombre de tours). Cela a considérablement augmenté la taille et le poids des moteurs. De plus, sur la surface lisse de l'armature, ses bobines étaient difficiles à fixer. Mais que peut-on faire ? En effet, pour agir sur un conducteur avec un courant de la force Ampère, il doit se situer en des points de l'espace avec un grand champ magnétique (avec une grande induction magnétique).
Il s'est avéré que ce n'est pas nécessaire. L'inventeur américain de la mitrailleuse H. Maxim a montré que si l'armature du tambour est dentée et que les bobines d'enroulement du tambour sont placées dans les rainures formées entre les dents, l'écart entre elle et les pôles de champ peut être réduit à des fractions d'un millimètre. Cela a permis de réduire significativement la taille des bobines d'excitation, mais le couple DCT n'a pas du tout diminué.
Comment fonctionne un tel moteur à courant continu ? Le principe de fonctionnement est basé sur le fait qu'avec une armature d'engrenage, la force magnétique n'est pas appliquée aux conducteurs dans ses rainures (il n'y a pratiquement pas de champ magnétique), mais aux dents elles-mêmes. Dans ce cas, la présence de courant dans le conducteur de la rainure est d'une importance décisive pour l'apparition de cette force.
Comment se débarrasser des courants de Foucault
Une autre amélioration importante a été apportée par le célèbre inventeur T. Edison. Qu'a-t-il ajouté au moteur à courant continu? Le principe de fonctionnement est resté inchangé, mais le matériau à partir duquel son ancrage est fabriqué a changé. Au lieu du massif précédent, il est devenu recouvert de fines tôles d'acier isolées électriquement les unes des autres. Cela a permis de réduire la valeur des courants de Foucault (courants de Foucault) dans l'induit, ce qui a augmenté le rendement du moteur. 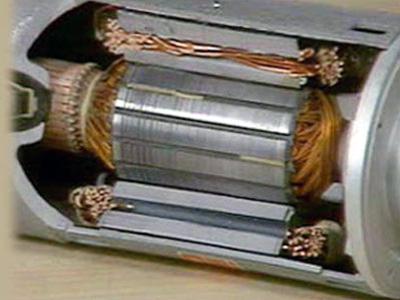
Le principe de fonctionnement d'un moteur à courant continu
En bref, il peut être formulé comme suit: lorsque l'enroulement d'induit d'un moteur excité est connecté à une source d'alimentation, un courant important y apparaît, appelé courant de démarrage et dépassant plusieurs fois sa valeur nominale. De plus, sous les pôles d'excitation de polarité opposée, le sens des courants dans les conducteurs de l'enroulement d'induit est également opposé, comme le montre la figure ci-dessous. Selon ces conducteurs, les forces d'Ampère agissent dans le sens inverse des aiguilles d'une montre et entraînent l'ancre en rotation. Dans ce cas, dans les conducteurs de l'enroulement d'induit, dirigé à l'opposé de la tension de la source d'alimentation est induite. Au fur et à mesure que l'armature accélère, la force contre-électromotrice dans son enroulement augmente également. En conséquence, le courant d'induit diminue du courant de démarrage à une valeur correspondant au point de fonctionnement sur la caractéristique du moteur. 
Pour augmenter la vitesse de rotation de l'armature, vous devez soit augmenter le courant dans son enroulement, soit réduire la force contre-électromotrice qu'il contient. Ce dernier peut être obtenu en réduisant l'amplitude du champ magnétique d'excitation en réduisant le courant dans l'enroulement d'excitation. Cette méthode de contrôle de la vitesse du DCT est très répandue.
Le principe de fonctionnement d'un moteur à courant continu à excitation indépendante
Avec la connexion des fils de l'enroulement d'excitation (OB) à une alimentation séparée (OB indépendant), des DCC puissants sont généralement effectués afin de faciliter la régulation de la valeur du courant d'excitation (afin de modifier la rotation la vitesse). En termes de propriétés, les DCT avec un OF indépendant sont pratiquement similaires aux DCT avec un OF, connectés en parallèle à l'enroulement d'induit.
Excitation DCT parallèle
Le principe de fonctionnement d'un moteur à courant continu à excitation parallèle est déterminé par ses caractéristiques mécaniques, c'est-à-dire la dépendance de la vitesse de rotation sur le moment de charge sur son arbre. Pour un tel moteur, la variation de régime lors du passage du régime de ralenti au couple résistant nominal est de 2 à 10 %. De telles caractéristiques mécaniques sont dites rigides. 
Ainsi, le principe de fonctionnement d'un moteur à courant continu à excitation parallèle détermine son utilisation dans les variateurs avec vitesse constante rotation avec une large plage de variation de charge. Cependant, il est également largement utilisé dans les variateurs de vitesse à vitesse variable. Dans ce cas, pour réguler sa vitesse, une variation à la fois du courant d'induit et du courant d'excitation peut être utilisée.
Excitation séquentielle de DPT
Le principe de fonctionnement d'un moteur à courant continu excitation séquentielle, ainsi que parallèle, est déterminé par sa caractéristique mécanique, qui dans ce cas est molle, car la vitesse du moteur varie considérablement avec les changements de charge. Où est le plus rentable d'utiliser un tel moteur à courant continu ? Le principe de fonctionnement d'un moteur de traction ferroviaire, dont la vitesse doit décroître lorsque le train franchit des soulèvements et revenir au nominal lors d'un déplacement en plaine, correspond tout à fait aux caractéristiques d'un moteur à courant continu avec un OF, connecté en série avec le enroulement d'induit. Par conséquent, une partie importante des locomotives électriques dans le monde sont équipées de tels dispositifs.
Le principe de fonctionnement d'un moteur à courant continu à excitation séquentielle est également mis en œuvre par des moteurs de traction à courant pulsé, qui sont, en fait, les mêmes moteurs à courant continu avec un OB séquentiel, mais spécialement conçus pour fonctionner avec un courant redressé déjà à bord d'une locomotive électrique , qui a des ondulations importantes.
Conférence numéro 2
Terminologie + tout sur le moteur à courant continu à excitation indépendante
Entraînement électrique automatisé - entraînement électrique, dans lequel la régulation des modes de fonctionnement est effectuée à l'aide de dispositifs de commande automatique conformément aux exigences processus de production... Des convertisseurs de puissance à semi-conducteurs, des systèmes de contrôle sans contact, des microprocesseurs, des contrôleurs programmables et d'autres équipements d'automatisation sont utilisés pour contrôler AE. Les types existants d'entraînements électriques automatisés remplissent une grande variété de fonctions - de relativement simple (démarrage, arrêt automatique, inversion du mécanisme, maintien ou modification de sa vitesse avec une grande précision, etc.) au contrôle d'installations complexes avec une automatisation complexe des processus technologiques . Les types les plus importants d'entraînement électrique automatisé comprennent les entraînements électriques de suivi, positionnels, contrôlés par logiciel, etc. Suivi de l'entraînement électrique - un entraînement électrique avec un système de contrôle automatique qui fournit le mouvement organe exécutif machine de travail en fonction du mouvement de l'objet contrôlé. L'entraînement électrique de suivi contient un dispositif d'entraînement, un capteur de position, des dispositifs de comparaison, des amplificateurs et un servomoteur. Ils sont utilisés dans les systèmes de contrôle automatique, la transmission d'informations et la mesure. Dans le processus d'usinage sur des machines CNC, des mouvements certains et précis de l'outil et de la pièce sont nécessaires, c'est pourquoi nous contrôlons à la fois les coordonnées de l'arête de coupe et la vitesse de coupe. Les mouvements sont effectués à l'aide de divers moteurs, moteurs. L'entraînement est le moteur, le convertisseur de commande + la transmission mécanique à l'élément de travail, par exemple à la broche d'un tour, d'une fraise ou d'une meule. En plus de l'entraînement principal, les machines-outils disposent d'entraînements auxiliaires supplémentaires pour d'autres coordonnées, d'entraînements du dispositif de serrage, d'entraînements pour la commutation automatique des embrayages, etc. L'entraînement principal effectue le travail principal du cycle de production. Les entraînements auxiliaires sont activés périodiquement. Il existe plusieurs moteurs d'entraînement sur les machines-outils modernes. Dans les robots, chaque degré de liberté a son propre moteur. Plus la pièce à réaliser est grande, plus la taille des machines est grande et plus leurs entraînements sont puissants. Lorsque les mouvements le long de différents degrés de liberté sont reliés par plusieurs rapports, ils sont synchronisés par des transmissions mécaniques. Par exemple, la rotation ω et avance longitudinale Z dans un tour, il est plus facile à réaliser avec un seul moteur. En tapotant, sélectionnez un rapport de démultiplication tel que la cylindrée Z par pas de filetage par tour de broche. Comme trajectoire de mouvement X(t), oui(t), z(t) , et les vitesses de déplacement correspondantes du corps de travail dx/ dt, mourir/ dt, dz/ dt peut être assez complexe. La précision avec laquelle la machine exécute ses fonctions sans erreurs est fixée par le concepteur qui conçoit la machine. Ils doivent connaître et comprendre ces raisons. La machine est conçue pour certaines dimensions et poids de pièces. Plus les pièces sont grandes, plus le squelette fonctionnel de la machine doit être rigide et massif. Il y a une vitesse de coupe optimale dans chaque opération sur la machine. Pour l'ébauche de la pièce par diamètre ré vitesse de coupe υ=ω· ré/2 petit, mais avec une alimentation accrue est sélectionné. Pour le tournage fin ou le meulage, les vitesses périphériques υ=ω· ré/2 nommer quelques dizaines de mètres par seconde. En conséquence, l'entraînement fournit un changement dans la vitesse de rotation de la broche de ω min avant ω max... Lorsqu'on caractérise une machine, on parle de plage de contrôle, c'est-à-dire sur l'attitude ω max /ω min... Transition à une vitesse ω 1 à un autre ω 2 , ω 3 , etc. est réalisée par commutation mécanique des engrenages du réducteur, commutation électromécanique des engrenages du réducteur ou régulation continue en douceur au moyen de moteurs électriques. Il est probable qu'un changement continu d'une vitesse à une autre est préférable à un changement progressif avec des arrêts. Le démarrage et l'arrêt brusques sont des charges de choc sur la transmission et le squelette de la machine. Les impacts violents réduiront la durée de vie de la machine.Mécanique de l'entraînement électrique
Fig. 0 Schéma fonctionnel de l'entraînement électrique
L'entraînement électrique est un système électromécanique unique, schéma structurel qui a la forme (Fig. 0) : ESU - la partie énergétique du système de contrôle ; ISU - partie information du système de contrôle ; EMF - convertisseur électromécanique; RD - rotor de moteur; PM - mécanisme de transmission; La MI est un mécanisme exécutif. L'énergie électrique consommée du réseau est convertie en énergie mécanique par un convertisseur électromécanique (CEM). L'énergie mécanique est transférée au rotor du moteur (RD), où elle est partiellement dépensée pour augmenter le stock d'énergie cinétique et pour les pertes mécaniques du moteur. Le reste de l'énergie mécanique de l'arbre du moteur via le mécanisme de transmission PM pénètre dans l'actionneur IM, puis dans son corps de travail. Dans un entraînement électrique moderne, un ESU est un convertisseur contrôlé énergie électrique d'un type ou d'un autre, assurant la conversion du courant, de la tension et de la fréquence nécessaire au fonctionnement de l'entraînement électrique. Système d'Information Le contrôle (IMS) gère le processus de conversion de l'énergie (électrique en mécanique et vice versa) sur la base d'informations sur les modes de fonctionnement spécifiés, l'état actuel du système et le déroulement du processus technologique. Vers le rotor du moteur à vitesse ω couple électromagnétique appliqué M, sous l'action de laquelle la partie mécanique est mise en mouvement et la processus technologique Travail.
CARACTÉRISTIQUES MÉCANIQUES DES MOTEURS À COURANT CONTINU
Conversion électromécanique de l'énergie électrique
en mécanique
La machine électrique à courant continu (DCM) a une conception spécifique. Il est représenté schématiquement sur la figure 1. La partie fixe (stator) contient les pôles principaux avec des bobines formant un système d'inductance ou d'excitation de la machine. Les pôles sont uniformément répartis sur surface intérieure lit, qui combine les fonctions d'une partie mécanique (boîtier) et d'une partie active (culasse du circuit magnétique du stator). Étant donné qu'un flux magnétique constant traverse le cadre (culasse), qui n'y induit pas de courants de Foucault, il est en acier monolithique. Quant aux âmes des pôles principaux, elles sont le plus souvent réalisées doublées : elles sont constituées de plaques séparées serrées par des rivets, des goupilles, etc. Il faut savoir qu'une telle solution est dictée plutôt par la commodité de fabrication du pôle que par la volonté de limiter les courants de Foucault. Pour assurer une commutation sans étincelles, des pôles supplémentaires sont prévus dans la machine, dont les enroulements sont connectés en série au circuit d'induit. Le rotor MPT est plus souvent appelé ancre. Il porte l'enroulement principal de la machine dans lequel circule son courant principal. L'enroulement d'induit est situé dans les rainures du circuit magnétique. Les fils d'enroulement sont connectés aux plaques collectrices. Le circuit magnétique et le collecteur sont situés sur un arbre commun. Il est important de savoir que les rainures du circuit magnétique doivent être strictement orientées par rapport aux plaques collectrices. C'est un préalable performances normales du MPT. À cela, il convient également d'ajouter que, dans une moindre mesure, ce problème est résolu par la séquence de connexion des bornes de l'enroulement d'induit avec les plaques collectrices. L'orientation mutuelle rigide des plaques collectrices par rapport aux fentes du noyau est assurée par l'utilisation de connexions clavetées de ces unités avec l'arbre et le strict respect du schéma de câblage des fils d'enroulement sur les plaques collectrices. Les brosses du collecteur sont pressées contre la surface externe (active) du collecteur. Ils peuvent être du charbon, du graphite, des composites, etc. Un groupe peut contenir un ou plusieurs balais, selon le courant traversé par le contact. Une diminution du nombre de brosses dans un groupe entraînera toujours une détérioration des paramètres MPT. La zone de contact (adhérence - 100 %) et la force d'appui de la brosse sur le collecteur sont importantes. Il ne faut pas oublier qu'avec le temps, les balais s'usent et la force de leur pression sur le collecteur s'affaiblit.
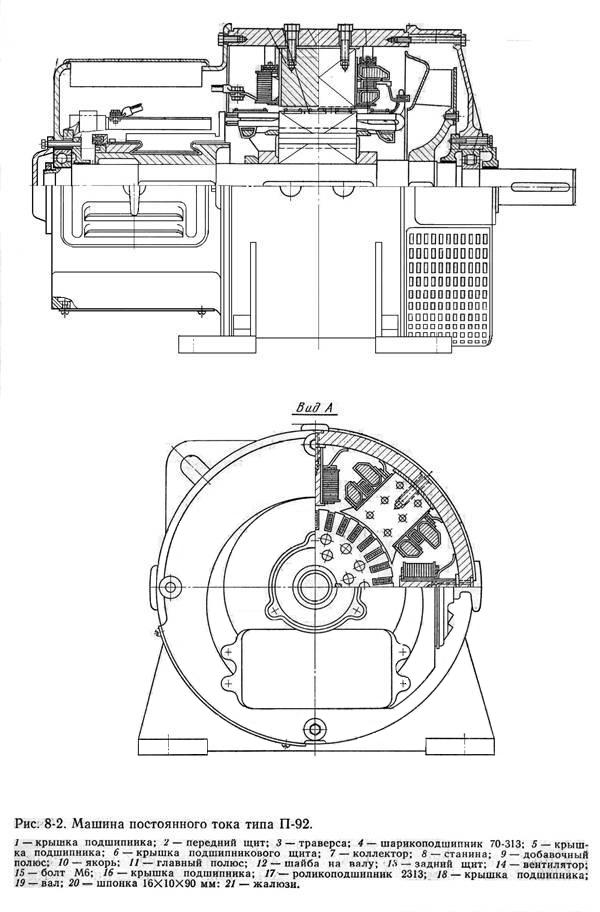
Fig. 1. Type de machine à courant continu P-92
Les balais MPT sont installés dans des porte-balais, qui orientent et pressent le balai. Eux-mêmes, les porte-balais sont placés sur des axes spéciaux de la traverse montés sur à l'intérieur bouclier d'extrémité. La traverse a la capacité de tourner autour de l'axe de la machine et de la fixer dans n'importe quelle position sélectionnée. Ceci permet, si nécessaire, d'ajuster la position des balais sur le collecteur à partir de la condition de minimum d'étincelles au contact des balais. Les machines à courant continu (DCM) sont plus souvent utilisées comme moteurs, elles ont un couple de démarrage élevé, la capacité d'ajuster largement la vitesse, sont facilement réversibles, ont des caractéristiques de contrôle presque linéaires et sont économiques. Ces avantages des MPT les placent souvent hors de compétition dans les variateurs qui nécessitent des réglages larges et précis. Un avantage important des MPT est également la possibilité de leur régulation par des circuits d'excitation à faible courant. Cependant, ces machines ne sont utilisées que lorsqu'il est impossible de trouver un remplacement équivalent. Ceci est dû à la présence d'un ensemble balai-collecteur. C'est lui qui provoque la plupart des inconvénients du MPT : il augmente son coût, réduit la ressource, crée des interférences radio, du bruit acoustique. Des étincelles sous les brosses augmentent les exigences de environnement, accélère l'usure des balais et des plaques collectrices. Les produits d'usure recouvrent la cavité interne de la machine d'une fine couche conductrice, détériorant l'isolation des circuits porteurs de courant. Et c'est loin d'être Liste complète problèmes liés à l'ensemble balais-collecteur MPT.

Riz. 1.1. Circuits d'excitation des machines à courant continu
Excitation est un concept associé à la création du champ magnétique principal de la machine. Dans les machines à excitation électromagnétique, le champ principal est créé par les enroulements d'excitation. Il y a des constructions dans lesquelles l'excitation est créée aimants permanents placé sur le stator. Il existe quatre schémas d'activation des enroulements du stator: avec excitation indépendante, parallèle, série et mixte (Fig. 1.1.). Les images sous les éléments b, c, d de la Fig. 1.1 sont appelés circuits auto-excités. Le processus d'auto-excitation se produit en raison de l'aimantation résiduelle des pôles et du cadre. Lorsque l'armature tourne dans ce champ magnétique de faible amplitude (Ф ОСТ = 0,02 0,03 О), EMF - E ОСТ est induit. Étant donné que l'enroulement de champ est connecté via les balais à l'armature, un courant y circulera. Ce courant va amplifier foyer magnétique pôles et conduira à une augmentation de la FEM de l'induit. Une grande force électromagnétique augmentera à nouveau le courant d'excitation et une augmentation du flux magnétique se produira jusqu'à ce que la machine soit complètement magnétisée. Le fonctionnement d'un moteur électrique et d'un générateur à courant continu est caractérisé par les grandeurs de base suivantes :
- M est le moment électromagnétique développé par le moteur électrique, Nm ; M c - moment de résistance (charge, moment statique) créé par le mécanisme de production, N · m; I I - le courant de l'induit du moteur électrique, A; U est la tension appliquée à la chaîne d'ancre, V ; E est la force électromotrice (fem) d'une machine à courant continu (pour un moteur électrique, on l'appelle contre-fem, car dans un moteur électrique, elle est dirigée vers la tension U et empêche le passage du courant), V; F est le flux magnétique créé dans le moteur électrique lorsque le courant traverse l'enroulement d'excitation, Wb ; R I - résistance du circuit d'induit, Ohm; ω est la vitesse angulaire (fréquence) de rotation de l'induit du moteur électrique, s -1 (au lieu de , on utilise souvent la valeur n, rpm),
 .
.
La relation entre ces valeurs se reflète dans les quatre formules suivantes :
 , (1.1)
, (1.1)
E = K * Ф * ω, (1.2)
 , (1.3)
, (1.3)
M = K * F * I i, (1.4)
où J est le moment d'inertie du système d'entraînement électrique, kg * m 2; dω / dt - accélération angulaire de l'arbre du moteur électrique, s -1; K - constante constructive du moteur électrique.  - constante constructive du moteur,
- constante constructive du moteur,  - nombre de paires de pôles ;
- nombre de paires de pôles ;  - le nombre de tiges actives ;
- le nombre de tiges actives ;  - nombre de paires de branches parallèles (nombre d'enroulements dans une section) ;. La formule (1.1) est un enregistrement modifié de l'équation de base du mouvement de l'entraînement électrique
- nombre de paires de branches parallèles (nombre d'enroulements dans une section) ;. La formule (1.1) est un enregistrement modifié de l'équation de base du mouvement de l'entraînement électrique  ... Il est facile de voir que l'équation de base du mouvement est un analogue de la loi de Newton a = F / m. La seule différence est que pour le mouvement rotatif l'accélération linéaire une est remplacé par l'accélération angulaire dω / dt, la masse m - par le moment d'inertie J, et la force F est remplacée par le moment dynamique M dyn, égal à la différence entre le moment du moteur électrique M et le moment statique M / s. La formule (1.2) reflète le principe de fonctionnement d'un générateur de courant continu basé sur la loi induction électromagnétique... Pour que la CEM apparaisse, il suffit de faire tourner l'induit à une certaine vitesse dans le flux magnétique F. La CEM E dans la machine ne peut être obtenue si au moins une des grandeurs est absente : ω (le moteur électrique fait pas tourner) ou Ф (la machine n'est pas excitée). La formule (1.3) montre que le courant I I dans le circuit d'induit circule dans le moteur sous l'action de la tension U appliquée à l'induit. L'amplitude de ce courant est limitée par la contre-électromotrice générée lors de la rotation du moteur électrique. E et la résistance de la chaîne d'ancre. La formule (1.4) illustre en effet le principe de fonctionnement d'un moteur électrique à courant continu (création de couple), basé sur la loi d'interaction entre le courant dans le conducteur et le champ magnétique. Pour ce faire, vous devez créer un flux magnétique et faire passer le courant I I le long de l'enroulement d'induit. Le moment sera toujours s'il y a un flux et un courant d'induit I i. Les formules (1.1) - (1.4) décrivent tous les processus principaux dans un moteur à courant continu. 1.2. Caractéristiques mécaniques et électromécaniques voiture électrique courant continu en mode moteur 1.2.1. Caractéristiques électromécaniques et mécaniques naturelles d'un moteur à courant continu à excitation indépendante (parallèle) Pour produire des caractéristiques électromécaniques ω = f 1 (I I) et mécaniques ω = f 2 (M) d'un moteur à courant continu à excitation indépendante le schéma le plus simple allumer le moteur (fig. 2). La tension secteur CC U c = U est appliquée à l'induit du moteur qui, en régime permanent, est équilibré par la FEM E du moteur et la chute de tension dans le circuit d'induit (I I ∙ R yats).
... Il est facile de voir que l'équation de base du mouvement est un analogue de la loi de Newton a = F / m. La seule différence est que pour le mouvement rotatif l'accélération linéaire une est remplacé par l'accélération angulaire dω / dt, la masse m - par le moment d'inertie J, et la force F est remplacée par le moment dynamique M dyn, égal à la différence entre le moment du moteur électrique M et le moment statique M / s. La formule (1.2) reflète le principe de fonctionnement d'un générateur de courant continu basé sur la loi induction électromagnétique... Pour que la CEM apparaisse, il suffit de faire tourner l'induit à une certaine vitesse dans le flux magnétique F. La CEM E dans la machine ne peut être obtenue si au moins une des grandeurs est absente : ω (le moteur électrique fait pas tourner) ou Ф (la machine n'est pas excitée). La formule (1.3) montre que le courant I I dans le circuit d'induit circule dans le moteur sous l'action de la tension U appliquée à l'induit. L'amplitude de ce courant est limitée par la contre-électromotrice générée lors de la rotation du moteur électrique. E et la résistance de la chaîne d'ancre. La formule (1.4) illustre en effet le principe de fonctionnement d'un moteur électrique à courant continu (création de couple), basé sur la loi d'interaction entre le courant dans le conducteur et le champ magnétique. Pour ce faire, vous devez créer un flux magnétique et faire passer le courant I I le long de l'enroulement d'induit. Le moment sera toujours s'il y a un flux et un courant d'induit I i. Les formules (1.1) - (1.4) décrivent tous les processus principaux dans un moteur à courant continu. 1.2. Caractéristiques mécaniques et électromécaniques voiture électrique courant continu en mode moteur 1.2.1. Caractéristiques électromécaniques et mécaniques naturelles d'un moteur à courant continu à excitation indépendante (parallèle) Pour produire des caractéristiques électromécaniques ω = f 1 (I I) et mécaniques ω = f 2 (M) d'un moteur à courant continu à excitation indépendante le schéma le plus simple allumer le moteur (fig. 2). La tension secteur CC U c = U est appliquée à l'induit du moteur qui, en régime permanent, est équilibré par la FEM E du moteur et la chute de tension dans le circuit d'induit (I I ∙ R yats).

Figure 2. Schéma électrique d'un moteur constant
courant d'excitation indépendant
U c = E + I I ∙ R oeuf, (1.5)
où R yats = R i + R DY + R dp + R ko, est la résistance du circuit d'induit, Ohm; R I - résistance de l'enroulement d'induit, Ohm; R ДЯ - résistance supplémentaire dans le circuit d'induit, Ohm; R dp, R ko - respectivement, la résistance des enroulements des pôles supplémentaires et l'enroulement de compensation, Ohm. En substituant dans l'équation (1.5) la valeur de E selon (1.2) et en effectuant les transformations appropriées par rapport à la fréquence de rotation ω, on obtient la caractéristique électromécanique d'un moteur électrique à courant continu à excitation indépendante (parallèle)
 . (1.6)
. (1.6)
En exprimant la valeur du courant d'induit en termes de moment électromagnétique (1.4) et en substituant la valeur du courant dans l'équation (1.6), on trouve la caractéristique mécanique d'un moteur à courant continu à excitation indépendante (parallèle) :
 . (1.7)
. (1.7)
En analysant les équations (1.6) et (1.7), nous voyons qu'il s'agit de l'équation d'une droite. Les caractéristiques naturelles du moteur sont mécaniques (électromécaniques) aux valeurs nominales de tension, de flux et d'absence de résistances externes dans le circuit d'induit, par exemple les formules (1.6) et (1.7), et, par conséquent, mécaniques (électromécaniques ) les caractéristiques seront artificielles si elles diffèrent de la valeur nominale de la tension secteur, du flux moteur (en introduisant une résistance externe dans le circuit d'enroulement inducteur) ou en introduisant une résistance externe dans le circuit d'induit, par exemple
![]() .
.
La valeur U avec / (K * F) = ω environ est appelée vitesse de ralenti idéale, et le rapport II * (RI / (K * F)) = M * (RI / (K * F) 2) = est appelé différentiel de vitesse statique. Alors la formule suivante est valide : ω = ω o - ω ; (1.8) Pour construire une caractéristique naturelle, il faut trouver deux points. L'un d'eux est déterminé à partir des données de passeport du moteur pour les valeurs nominales de n n, I n et M n :
n = n n / 30 = 0,105n n, M n = P n / ω n,
où P n est la puissance nominale du moteur, W; n n - régime nominal du moteur, tr/min. Le deuxième point correspond au régime de ralenti idéal lorsque I = 0 ; M = 0. Il peut être trouvé à partir de l'équation (1.6) lors de la substitution des données du passeport du moteur :
 ; (1.9)
; (1.9)
Si la valeur de la résistance de l'enroulement d'induit est inconnue, une formule approximative peut être utilisée, à condition que la moitié des pertes de puissance soient associées à des pertes dans le cuivre de l'enroulement d'induit, c'est-à-dire
I n 2 * Rя 0,5 * (1-) * U n * I n, (1,10)
Où est le coefficient action utile(Rendement) du moteur électrique, égal au rapport de la puissance utile P n = M n * ω n sur la puissance totale consommée par le moteur P plein = U n * I n. De la formule (1.10) on trouve
R i 0,5 * (1-) * U n / I n; (1.11)
R i = (U n * I n -P n) / (2 * I n 2). (1.12)
Lors du démarrage d'un moteur à courant continu, la vitesse initiale de l'induit = 0. Ensuite, selon l'équation (1.6), le courant de démarrage I p = U n / R n. Selon les conditions de commutation pour DPT NV, ils sont acceptés s'il n'y a pas de données de passeport,
Imax = (22,5) * I I. (1.13)
Une nouvelle augmentation du courant entraîne l'apparition d'un feu circulaire sur le collecteur et la panne du moteur électrique. De ces considérations, il s'ensuit que le couple moteur maximal doit également être pris égal à
Mmax = (, 5) * Mn. (1.14)
Pour limiter le courant d'appel, il est nécessaire de réduire la valeur de tension de la source d'alimentation pendant la période de démarrage ou d'introduire une résistance supplémentaire dans le circuit d'induit. Alors I p1 = U n / (R i + R 1) et I p1  Je max. Au fur et à mesure que l'armature accélère dans son enroulement, la force électromotrice augmente. E, en relation avec laquelle le courant d'induit diminue
Je max. Au fur et à mesure que l'armature accélère dans son enroulement, la force électromotrice augmente. E, en relation avec laquelle le courant d'induit diminue
I i = (U n - E) / (R i + R 1).
Simultanément à une diminution du courant, le couple moteur diminue, et, par conséquent, l'accélération du moteur. Pour maintenir une accélération constante du variateur, un tel circuit d'allumage d'une résistance supplémentaire au démarrage est adopté afin qu'il permette, lorsque l'instant de commutation est atteint, de réduire la résistance externe, ce qui conduira à une augmentation de la courant et couple du moteur à la valeur de la fem. E au moment de la commutation.
Contrôle de la vitesse du rhéostat
Elle est réalisée en introduisant des résistances actives- des résistances, c'est-à-dire R yats = R i + R 1 = var avec U = U n, Ф = Ф n ,. Comme le montre l'équation de la caractéristique électromécanique (1.6), seule la pente (rigidité) de la caractéristique change (Fig. 4, b). Selon les conditions de chauffage admissible, le courant d'induit ne doit pas dépasser la valeur nominale, c'est-à-dire I j'ajoute = I yang, puis M ajoute = K * F n * I j'ajoute = K * F n * I yang = M n. Dans ce cas, la régulation du rhéostat s'effectue à un couple statique admissible constant. Charactéristiques mécaniques Les DPT NV avec régulation rhéostat ont une forme étagée, la plage de régulation atteint D = 2 - 2,5, la puissance avec cette régulation est
P in = U n * I i = o * M = const. (1.15)
La puissance mécanique sur l'arbre moteur est
P m = * M, (1.16)
et le rendement du moteur dans ce cas sera égal à
= P m / P e = (ω * M) / (ω o * M) = / ω o. (1.17)
Contrôle de la vitesse lors du changement du magnétique
couler
Cette méthode de contrôle est réalisée en affaiblissant le flux magnétique de l'excitation du moteur. A partir de l'équation (1.6) de la caractéristique électromécanique (EMH), il est possible de déterminer la valeur de K * F.
K * F = (U n -I n * R i) / , (1.18)
Alors la valeur du moment admissible sera égale à
M ajouter = K * F * I n = (U n -I n * R i) * I n / ω. (1.19)
Conformément à l'équation (1.19), la dépendance du couple à la vitesse de rotation est une hyperbole. Les EMH ont un point commun I court-circuit. à = 0. Les caractéristiques mécaniques ont significations différentes des moments court-circuit M k..z. à = 0 en raison de l'affaiblissement du flux magnétique.

Figure 3. Caractéristiques mécaniques et électromécaniques du courant continu continu avec affaiblissement du flux magnétique.
Contrôle de vitesse de DPT NV lorsque la tension d'alimentation change
Lors de l'examen de cette méthode, des sources de tension réglables sont nécessaires. De l'équation des caractéristiques électromécaniques, on peut voir que la régulation de tension est associée à une modification du régime de ralenti idéal ω o = U n / (K * F n) tout en maintenant la rigidité des caractéristiques = (K * F ) 2 / R i. Ce dernier permet d'élargir considérablement la plage de régulation. Un autre avantage de la méthode est la régulation dans les circuits des dispositifs de commande (enroulement d'excitation Systèmes D-D), l'angle de fermeture de la vanne (TP-D), dont la puissance de commande est bien moindre par rapport aux circuits de puissance principaux. La commande de vitesse est généralement descendante par rapport à la vitesse principale. Les caractéristiques artificielles avec un changement de U c auront la forme de lignes droites illustrées à la Fig. 4, a. un B)

Figure 4. Caractéristiques mécaniques du DPT NV lors du changement de tension d'alimentation et avec régulation par rhéostat

Riz. 4.1. Schéma de connexion au réseau DCP d'excitation parallèle
En figue. 4.1. montre un circuit pour connecter un moteur à courant continu (excitation parallèle) au réseau.
Modes de freinage indépendants du moteur à courant continu
excitation
Pour un moteur à courant continu à excitation indépendante, trois types de freinage électrique sont caractéristiques :
- Freinage par générateur (régénératif). Freinage dynamique. Freinage par opposition.
Freinage récupératif
La condition pour le freinage par récupération est ω> ω o. En même temps, e. etc. avec. l'enroulement d'induit E sera supérieur à la tension secteur appliquée U n. Ensuite, le courant d'induit I I = (U n -E) / R I changera de direction et, par conséquent, le moment changera de direction et deviendra freinant
M g = -K * F n * I i.
L'équation CEM pour les caractéristiques d'un moteur à courant continu en freinage par récupération est obtenue à partir de l'équation (1.6 -) après avoir substitué la valeur de E :
 , (1.20)
, (1.20)
En comparant les équations (1.6 -) et (1.20), on voit que les caractéristiques passent à I i = 0 jusqu'à ω o et les EMH DPT NV en mode de freinage récupératif sont une continuation du mode moteur. Par exemple, avec une diminution de la tension sur l'enroulement d'induit du moteur à courant continu de la NV, un freinage du générateur est observé (Fig. 5, la caractéristique 5 est supérieure au régime de ralenti idéal jusqu'au point b).
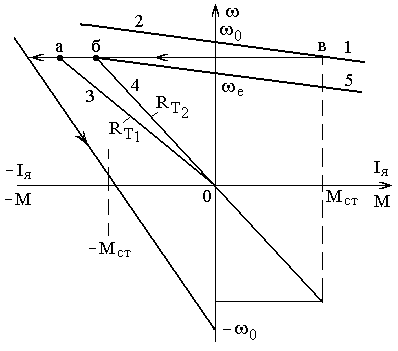
1 - mode moteur ; 2 - freinage régénératif ;
3, 4 - freinage dynamique à R T 1< R T 2 ;
5 - mode moteur à U< U н
Fig. 5 Caractéristiques électromécaniques et mécaniques de DPT NV
en modes de freinage
Freinage dynamique
Il existe deux types de freinage dynamique : 1) à excitation indépendante, lorsque le bobinage d'excitation est alimenté par source constante; 2) avec auto-excitation, lorsque l'enroulement d'excitation est connecté à l'induit. Conditions de freinage dynamique : 1. L'armature est déconnectée du secteur ;

Figure 6. Freinage dynamique avec excitation indépendante
2. L'armature, après déconnexion du réseau, est fermée à la résistance supplémentaire (Fig. 6). En mode de freinage dynamique, la source de courant est e. etc. avec. induit E, alors I t = -E / R yats, c'est-à-dire que le courant change de sens et crée un couple de freinage. Ensuite, l'EMH DPT NV est trouvé à partir de l'équation de base (1.21)
= -I I * Ryats / (K * F), (1,21)
Où R yats = R i + R t représente une droite passant par l'origine (Fig. 5 droites 3 et 4).
Freinage d'opposition
Il existe deux types de freinage opposé pour les moteurs DC DC. 1. Avec un moment statique actif, lorsqu'une grande résistance supplémentaire R 1 est introduite dans le circuit d'induit. Dans ce cas, le courant d'induit diminue, le couple moteur M devient inférieur au couple statique M cа et le moteur commence à diminuer la vitesse, puis, sous l'influence de M cа, il s'inverse et accélère dans le sens opposé à l'action du couple moteur (Fig. 7, ligne droite vr).

Fig. 7. Caractéristiques mécaniques du DPT NV lors du freinage
opposition
Le courant dans le mode de freinage à contre-commutation augmente lorsque la vitesse diminue, car avec un changement de sens de rotation ω< 0 э. д. с. изменит свой знак (участок вг) и будет действовать согласно с напряжением сети, вследствие чего ток станет равным I я = (U н +Е)/R яц и растет до значения, при котором тормозной момент достигает величины М cа. Наступит установившийся режим торможения при -ω е. ЭМХ может быть получена из уравнения (1.6 - ) и является аналогичной двигательному режиму. 2. При реактивном статическом моменте торможение противовключением получают путем изменения полярности напряжения на зажимах якоря. В этом случае ток I я = (-U н -Е)/R яц меняет свое направление и момент двигателя становится тормозным. Для ограничения тока при торможении противовключением по условиям коммутации или допустимым ускорениям включают добавочное сопротивление в цепь якоря. Тогда уравнение ЭМХ двигателя в режиме торможения противовключением получим из уравнения (1.6 - ) и после подстановки в него -U н получим
ω =- ω O - JE Je suis * R Oeuf / (K * F m ) (1.22)
La caractéristique passe par w о et w ñ (Fig. 7). Si à = 0 ; M c1< М к, то двигатель изменит направление вращения (реверс) и станет вращаться с частотой ω с1 . Если при ω = 0, М c1 >M à, alors l'induit du moteur circulera autour du courant, restant dans un état stationnaire, car le courant d'induit I I est inférieur à I s. La comparaison des indicateurs d'énergie du freinage dynamique et du freinage opposé montre que les pertes d'énergie dans le circuit d'induit en mode opposé sont liées aux pertes lors du freinage dynamique, comme 3:1 , et en marche arrière - 4:1 .
Fonction de transfert d'un moteur à courant continu à excitation indépendante
 , la fonction de transfert du moteur pour l'action de commande lorsque la vitesse est commandée en modifiant la tension d'induit, où :
, la fonction de transfert du moteur pour l'action de commande lorsque la vitesse est commandée en modifiant la tension d'induit, où : L'analyse et la généralisation de l'expérience et des tendances dans la création de robots industriels en robotique nationale et étrangère montre que l'entraînement électromécanique des robots industriels se généralise. L'année dernière
DocumentL'analyse et la généralisation de l'expérience et des tendances dans la création de robots industriels en robotique nationale et étrangère montre que l'entraînement électromécanique des robots industriels est de plus en plus répandu.
Réservez un (1)
LivreIl est comme un homme construisant une maison qui a creusé, est allé profondément et a posé les fondations sur la pierre, eh bien, quand le déluge est arrivé, et que l'eau a poussé sur cette maison, elle n'a pas pu l'ébranler, car elle était basée sur la pierre.
32. Caractéristiques mécaniques du DC ED
Moteur à courant continu d'excitation série : L'équation caractéristique mécanique a la forme :
 , où est la fréquence de rotation, rad / s ; Rob - résistance de l'enroulement de l'excitation série, Ohm; α est le coefficient de dépendance linéaire (en première approximation) du flux magnétique sur le courant d'induit.
, où est la fréquence de rotation, rad / s ; Rob - résistance de l'enroulement de l'excitation série, Ohm; α est le coefficient de dépendance linéaire (en première approximation) du flux magnétique sur le courant d'induit.
D'après un examen de la Fig. il s'ensuit que les caractéristiques mécaniques du moteur considéré (naturelles et rhéostatiques) sont molles et hyperboliques. Aux faibles charges, la vitesse de rotation augmente ainsi fortement et peut dépasser la valeur maximale autorisée (le moteur passe en "emballement"). De tels moteurs ne peuvent donc pas être utilisés pour entraîner des mécanismes fonctionnant au ralenti ou à faible charge (machines diverses, convoyeurs...). Habituellement, la charge minimale admissible est (0,2 - 0,25) IN0M ; seuls des moteurs de faible puissance (des dizaines de watts) sont utilisés pour fonctionner dans des appareils où le ralenti est possible. Pour éviter que le moteur ne fonctionne à vide, il est solidaire du mécanisme d'entraînement (engrenage ou accouplement aveugle) ; l'utilisation d'un entraînement par courroie ou d'un embrayage à friction pour l'engagement est inacceptable.
Malgré cet inconvénient, les moteurs à excitation séquentielle sont largement utilisés dans divers entraînements électriques, en particulier lorsqu'il existe une grande variation du couple de charge et des conditions de démarrage sévères (mécanismes de levage et d'orientation, entraînement de traction, etc.). En effet, la caractéristique douce du moteur considéré est plus favorable pour les conditions de fonctionnement spécifiées que la caractéristique dure du moteur à excitation parallèle.
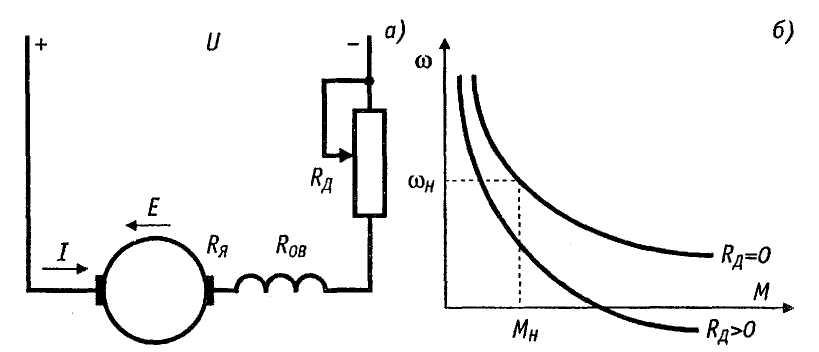
Moteur à courant continu d'excitation indépendante : Une caractéristique du moteur est que son courant d'excitation est indépendant du courant d'induit (courant de charge), car l'alimentation de l'enroulement d'excitation est essentiellement indépendante. Par conséquent, en négligeant l'effet démagnétisant de la réaction d'induit, on peut supposer approximativement que le flux du moteur ne dépend pas de la charge. Par conséquent, la caractéristique mécanique sera linéaire.
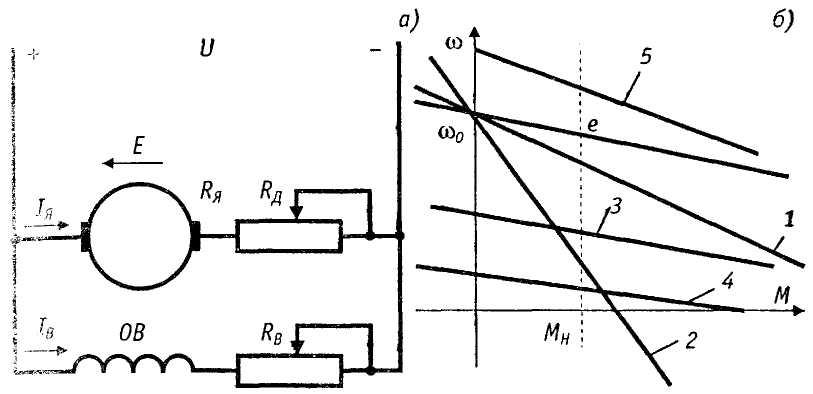
L'équation caractéristique mécanique a la forme : 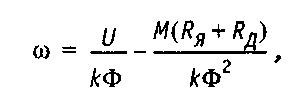 où ω - fréquence de rotation, rad / s; U est la tension appliquée au circuit d'induit, V; F - flux magnétique, Wb; Rя, Rд - résistance de l'induit et résistance supplémentaire dans son circuit, Ohm: α- constante constructive du moteur.
où ω - fréquence de rotation, rad / s; U est la tension appliquée au circuit d'induit, V; F - flux magnétique, Wb; Rя, Rд - résistance de l'induit et résistance supplémentaire dans son circuit, Ohm: α- constante constructive du moteur.
où p est le nombre de paires de pôles du moteur ; N est le nombre de conducteurs actifs de l'induit du moteur ; est le nombre de branches parallèles de l'enroulement d'induit. Couple moteur, N * m.
 - FEM d'un moteur à courant continu, V. À flux magnétique constant Ф = const, en supposant c = à Ф, alors l'expression du couple, N * m :
- FEM d'un moteur à courant continu, V. À flux magnétique constant Ф = const, en supposant c = à Ф, alors l'expression du couple, N * m :
1. Caractéristique mécanique e, obtenue pour les conditions Rd = O, Rw = 0, c'est-à-dire la tension d'induit et le flux magnétique du moteur sont égaux aux valeurs nominales, dites naturelles (Fig. 17.6).
2, Si Rd> O (Rw = 0), les caractéristiques de rhéostat artificiel 1 et 2 sont obtenues, en passant par le point ω0 - la vitesse de ralenti idéale de la machine. Plus il y a de poison, plus les caractéristiques sont raides.3, si vous modifiez la tension aux bornes de l'induit au moyen d'un convertisseur, à condition que Rd = 0 et Rv = 0, alors les caractéristiques mécaniques artificielles ont la forme 3 et 4 et sont parallèles à la naturelle et plus la plus basse est la valeur de la tension.
4, quand tension nominaleà l'induit (Rd = 0) et une diminution du flux magnétique (Rw> 0), les caractéristiques ont la forme 5 et passent plus celle naturelle est élevée et plus elle est raide, plus le flux magnétique est faible.
Moteur à courant continu à excitation mixte : Les caractéristiques de ces moteurs sont intermédiaires entre les caractéristiques des moteurs à excitation parallèle et série.
Lorsque les enroulements de champ série et parallèle sont connectés en accord, le moteur à champ mixte a un couple de démarrage plus élevé que le moteur à champ parallèle. Lorsque les enroulements d'excitation sont mis en opposition, le moteur acquiert une caractéristique mécanique rigide. Avec une charge croissante, le flux magnétique de l'enroulement série augmente et, soustrait du flux de l'enroulement parallèle, réduit le flux de champ total. Dans ce cas, la vitesse de rotation du moteur non seulement ne diminue pas, mais peut même augmenter (figure 6.19). Dans les deux cas, la présence du flux magnétique du bobinage parallèle exclut le mode « emballement » du moteur lorsque la charge est supprimée.


Les moteurs à courant continu avec contrôle de vitesse variable en continu sont utilisés dans les entraînements de diverses machines, machines-outils et installations. Associés à une large plage de réglage de la vitesse, ils permettent d'obtenir des caractéristiques mécaniques de rigidités diverses (requises).
Il est connu du cours de génie électrique que l'équation des caractéristiques mécaniques peut être écrite sous la forme
![]()
où les coefficients Ce et Cm dépendent des données de conception du moteur ; U est la tension secteur ; F est le flux magnétique du moteur ; R est la résistance du circuit d'induit.
La formule montre que si U, R et sont constants, la caractéristique mécanique du moteur à excitation parallèle est une droite (Fig.). S'il n'y a pas de résistances dans le circuit d'induit, la caractéristique mécanique est naturelle (ligne droite 1, Fig. A). Le point A correspond au régime nominal n n, et n o est appelé le régime de ralenti idéal. La rigidité de la caractéristique est déterminée par la résistance du moteur R ", qui comprend la résistance de l'enroulement d'induit, des pôles supplémentaires, un enroulement de compensation, des balais. L'effet de la résistance dans le circuit d'induit sur la caractéristique est illustré par des lignes droites 2 et 3 (voir Fig. A).
Riz. 1. Caractéristiques mécaniques des moteurs à courant continu: a - lorsque la résistance dans le circuit du rotor change, b - lorsque la tension dans le circuit d'induit d'un moteur à courant continu à excitation indépendante change, c - lorsque la vitesse de rotation est contrôlée en shuntant l'enroulement d'excitation du moteur à excitation série, d - avec différents modes de freinage.
La formule permet d'estimer l'influence de la tension U et du flux F. Lorsque U change, la caractéristique mécanique d'un moteur à excitation indépendante se déplace parallèlement à la caractéristique naturelle (Fig. B); le régime de ralenti à R et U constants évolue en sens inverse du débit.
De la formule pour n = 0, nous avons
![]()
c'est-à-dire que le couple de démarrage est proportionnel au débit.
Ainsi, la vitesse du moteur peut être régulée en modifiant le flux magnétique, la tension fournie à l'enroulement d'induit, en introduisant des résistances dans le circuit d'induit.
La régulation du régime moteur en modifiant est assez souvent utilisée, car la régulation est douce, sans grandes pertes d'énergie, se prêtant à l'automatisation. La plage de régulation dans le sens de l'augmentation de la fréquence de rotation ne dépasse pas 1: 4, elle peut être étendue en introduisant un petit enroulement stabilisateur d'excitation en série avec l'enroulement de pôles supplémentaires.
La régulation de la vitesse de rotation en modifiant la tension fournie au circuit d'induit du moteur est largement utilisée dans un moteur à excitation indépendante (Fig. B). Actuellement, les moteurs sont produits avec une plage de régulation allant jusqu'à 1: 8, la plage est augmentée lors de l'utilisation de convertisseurs à thyristors.










