Caractéristiques mécaniques d'un moteur à courant continu à excitation indépendante. Excitation dans les moteurs à courant continu
Page 1
Moteur courant continu excitation indépendante, dont la vitesse de rotation est régulée par la tension d'induit.
Les moteurs à courant continu à excitation indépendante sont utilisés dans les mécanismes d'ETU dans les cas où il est nécessaire de réguler en profondeur la vitesse à haute qualité processus transitoires.
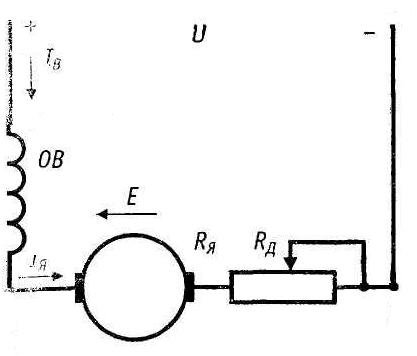
Un moteur à courant continu à excitation indépendante est alimenté par deux groupes de thyratrons. Une paire de TI et G3 sert à alimenter l'enroulement d'induit, la deuxième paire T3 et T - à alimenter l'enroulement de champ.
Les moteurs à courant continu à excitation indépendante sont principalement utilisés lorsque les conditions de fonctionnement nécessitent un contrôle de vitesse profond et régulier, ainsi que dans les cas où il est nécessaire de faire fonctionner le variateur à basse vitesse.
Pour les moteurs à courant continu d'excitation indépendante à une valeur constante du flux magnétique f fnom, le couple est proportionnel au courant, par conséquent, un couple équivalent peut être utilisé.
Pour un moteur à courant continu à excitation indépendante, c'est le régime de ralenti idéal, déterminé par le rapport f/max/C, pour un entraînement hydraulique, c'est la vitesse développée organe exécutif avec ouverture totale des canaux dans le distributeur, pleine utilisation de la pression d'alimentation et aucune force de résistance.
| Schéma de principe du branchement du relais anti-coupure | Caractéristiques de tension sur le relais anti-coupure pour les différents points de connexion du relais (moteur à courant continu d'excitation indépendante. |
Pour un moteur à courant continu à excitation indépendante, les valeurs de U, R et F sont constantes ; donc, pour un point de connexion donné du relais, lorsque Rx est également constant, la dépendance Upn - f (w) est linéaire.
Le contrôle de la vitesse d'un moteur à courant continu à excitation indépendante en modifiant le flux magnétique dans les modes moteur et générateur est un contrôle ascendant à une zone. La valeur nominale du flux magnétique étant la plus élevée, l'évolution du flux n'est possible que dans le sens décroissant par rapport au nominal. Ce dernier entraîne une augmentation du régime moteur dans tous les modes de fonctionnement.
Bonne journée, chers lecteurs ! Dans cet article, je parlerai de ce qu'est l'excitation dans les moteurs à courant continu et de "avec quoi elle est mangée".
Probablement, chacun de nous dans l'enfance avait des jouets à entraînement électrique. Les curieux de ces années-là n'ont pas manqué l'occasion de démonter ces jouets pour voir ce qu'il y avait à l'intérieur.
En regardant à l'intérieur d'un tel jouet, nous avons trouvé un petit moteur électrique à courant continu. Naturellement, nous n'avons même pas réfléchi à la raison pour laquelle cela fonctionne. Certains d'entre nous, ayant trouvé un moteur dans le jouet, ont également osé le démonter. Ces camarades curieux, après avoir démonté le moteur, y trouvèrent un aimant permanent (parfois plus d'un), des balais et une ancre avec un collecteur.
Ainsi, un aimant permanent est le système d'excitation le plus simple pour les moteurs à courant continu. Après tout, l'armature du moteur ne tourne que lorsqu'elle est entourée d'un champ magnétique constant, créé à l'aide d'un aimant permanent.
Les moteurs à courant continu à l'échelle commerciale utilisent des enroulements spéciaux comme excitateurs appelés enroulements de champ.
La connexion de ces enroulements peut être très différente. Ils peuvent être connectés en parallèle avec l'armature, en série avec elle, en mélange et, même, indépendamment d'eux.
Soit dit en passant, les moteurs qui ont un aimant permanent comme excitateur sont considérés comme des dispositifs excités indépendamment.
L'enroulement d'excitation se compose d'un nombre de spires nettement plus important que l'enroulement d'induit. À cet égard, le courant de l'enroulement d'induit est dix fois plus élevé que le courant de l'excitateur. La vitesse de rotation d'un tel moteur peut varier en fonction de la charge et du flux magnétique. Grâce aux propriétés de connexion, les moteurs connexion parallèle assez sujet aux changements de vitesse.
Considérons maintenant l'option d'une connexion séparée des enroulements de travail et d'excitation. Un tel moteur est appelé moteur à excitation indépendant. La vitesse d'un tel moteur peut être ajustée en changeant la résistance Chaîne d'ancrage ou flux magnétique.
Il y a ici une petite nuance: ne réduisez pas trop le courant d'excitation lorsque le moteur est allumé de cette manière, car cela entraîne une très forte augmentation du courant d'induit. Le même est dangereux et un circuit ouvert de l'excitation de ces moteurs. De plus, si la charge du moteur avec une telle inclusion est faible, ou lorsqu'il est allumé au ralenti, une accélération si forte peut se produire qu'il y a un danger pour le moteur.
Comme je l'ai déjà dit, un type de DCT à excitation indépendante est considéré comme un dispositif qui a des aimants permanents comme excitateur. Je dirai aussi quelques mots à leur sujet.
Étant donné que les moteurs à courant continu et les machines de type synchrone peuvent utiliser des aimants permanents au lieu d'excitateurs, cette option est considérée comme assez attrayante. Et c'est pourquoi:
- un tel dispositif a réduit la consommation de courant en réduisant le nombre d'enroulements, de sorte que les indicateurs de telles machines, tels que l'efficacité, sont plus élevés;
- avec l'utilisation d'aimants permanents à la place de l'excitatrice, la conception des circuits d'excitation du moteur est simplifiée, ce qui augmente sa fiabilité, car l'aimant permanent ne nécessite pas d'alimentation, par conséquent, un tel moteur n'a pas d'unité de collecte de courant sur le rotor.
Parlons maintenant de la connexion en série des enroulements (moteurs à excitation série).
Dans cette option de connexion, le courant d'induit sera également excitant. Cela provoque une forte variation du flux magnétique en fonction de la charge. C'est la raison de la grande indésirabilité de les démarrer au ralenti et à faible charge.
L'application a trouvé une telle inclusion lorsqu'un moment de démarrage important est requis, ou la capacité de résister à des surcharges à court terme. À cet égard, ils sont utilisés comme moyen de traction pour les tramways, les trolleybus, les locomotives électriques, le métro et les grues. De plus, ils sont utilisés comme moyen de démarrage pour les moteurs à combustion interne (comme démarreurs).
La dernière option pour allumer les moteurs à courant continu est leur inclusion mixte. Chacun des pôles de ces moteurs est équipé d'une paire de bobinages, l'un en parallèle et l'autre en série. Il y a deux façons de les connecter :
- méthode des consonnes (dans ce cas, les courants sont additionnés);
- l'option inverse (soustraction des courants).
Ainsi, selon l'option de raccordement (qui modifie également le rapport des flux magnétiques), un tel moteur peut être proche soit d'un appareil à excitation série, soit d'un moteur à excitation parallèle.
Dans la plupart des cas, ils considèrent l'enroulement en série comme l'enroulement principal et l'enroulement auxiliaire en parallèle. En raison de l'enroulement parallèle de ces moteurs, la vitesse n'augmente pratiquement pas à faible charge.
Si un couple important au démarrage est requis et la possibilité de réguler la vitesse sur des charges variables, une connexion conforme est utilisée. La connexion inverse est utilisée lorsqu'il est nécessaire d'obtenir une vitesse constante avec une charge variable.
S'il devient nécessaire d'inverser le DCT (changer le sens de sa rotation), changez le sens du courant dans l'un de ses enroulements de travail.
En changeant la polarité de connexion des bornes du moteur, il est possible de changer le sens uniquement des moteurs allumés selon un circuit indépendant, ou des moteurs avec un aimant permanent comme excitatrice. Dans tous les autres appareils, il est nécessaire de changer le sens du courant dans l'un des enroulements de travail.
De plus, les moteurs à courant continu ne peuvent pas être mis en marche par la méthode de connexion à pleine tension. Cela est dû au fait que la valeur de leur courant de démarrage est environ 2 douzaines de fois supérieure à la valeur nominale (cela dépend de la taille et de la vitesse du moteur). Les courants de démarrage des gros moteurs peuvent même dépasser de cinquante fois leur courant nominal de fonctionnement.
Des courants importants peuvent provoquer l'effet d'un arc de cercle du collecteur, à la suite duquel le collecteur est détruit.
Pour allumer le DPT, on utilise la technique, soit l'utilisation de rhéostats de démarrage. L'inclusion d'un type direct n'est possible qu'à basse tension et pour les petits moteurs avec une résistance élevée de l'enroulement d'induit.
Ecrire des commentaires, des ajouts à l'article, j'ai peut-être raté quelque chose. Jetez un oeil à, je serai heureux si vous trouvez quelque chose d'autre utile sur mon site. Tous mes vœux.
§ 115. Caractéristiques des moteurs à courant continu
Les propriétés de fonctionnement des moteurs sont déterminées par leurs caractéristiques de fonctionnement, qui sont les dépendances du nombre de tours m, couple M e, courant consommé je 1, puissance P 1 et rendement de la puissance nette à l'arbre R 2, c'est-à-dire
m; M N.-É. ; je 1 ; P 1 ; = F (R 2).
Ces dépendances correspondent aux conditions naturelles de fonctionnement du moteur, c'est-à-dire que la machine n'est pas régulée et que la tension du réseau reste constante. Depuis quand la puissance nette change R 2 (c'est-à-dire la charge sur l'arbre) modifie également le courant dans l'induit de la machine, puis les caractéristiques de performance sont souvent construites en fonction du courant dans l'induit. Nous considérerons la dépendance du couple et de la vitesse de rotation sur le courant d'induit pour des moteurs à excitation différente.
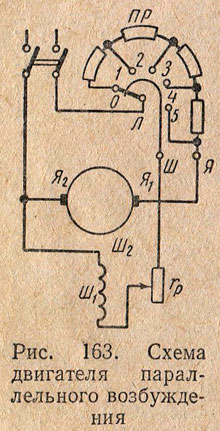
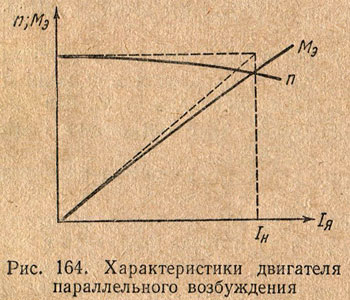
Les caractéristiques du moteur à excitation parallèle sont illustrées à la Fig. 164, et son schéma est illustré ci-dessus (voir fig. 163).
Le régime moteur est déterminé par l'expression suivante :
À mesure que la charge sur l'arbre du moteur augmente, le courant d'induit augmente également. Cela provoque une augmentation de la chute de tension dans la résistance de l'enroulement d'induit et des contacts des balais ( je Je suis r Je suis).
Le courant d'excitation et le flux magnétique restent inchangés. Cependant, avec une augmentation du courant dans l'induit, l'effet démagnétisant du flux de réaction d'induit augmente et le flux magnétique diminue légèrement. Augmenter je Je suis r i provoque une diminution de la vitesse du moteur, et une diminution de augmente sa vitesse. Typiquement, une chute de tension affecte le changement de vitesse dans une mesure légèrement supérieure à la réponse de l'induit, de sorte qu'avec une augmentation du courant d'induit, la vitesse diminue. La variation de vitesse pour un moteur de ce type est insignifiante et ne dépasse pas 5% lorsque la charge passe de zéro à nominale, c'est-à-dire que les moteurs à excitation parallèle ont une caractéristique de vitesse rigide.
Le couple moteur est égal à :
M e = kΦ je Je suis. (151)
Avec un flux magnétique constant, la dépendance du moment par rapport au courant dans l'armature sera représentée par une ligne droite. Mais sous l'influence de la réaction d'induit avec une augmentation de la charge, une légère diminution du flux magnétique se produit et la dépendance du moment ira légèrement en dessous de la ligne droite.

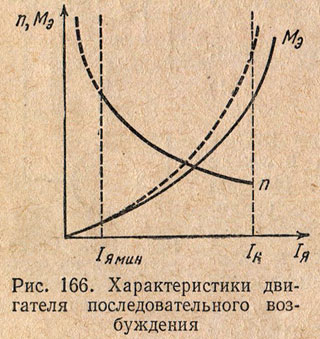
Le circuit d'un moteur à excitation série est illustré à la Fig. 165. Le rhéostat de démarrage de ce moteur n'a que deux pinces, car l'enroulement de champ et l'armature forment un circuit en série. Les caractéristiques du moteur sont indiquées sur la fig. 166.
Le nombre de tours du moteur à excitation séquentielle est déterminé par l'expression suivante :
où r c est la résistance de l'enroulement de champ série.
Dans un moteur à excitation séquentielle, le flux ne reste pas constant, mais change fortement avec l'évolution de la charge, ce qui provoque un changement important de vitesse. Étant donné que la chute de tension dans la résistance de l'induit et de l'enroulement d'excitation est très faible par rapport à la tension appliquée, le nombre de tours peut être déterminé approximativement par l'expression suivante :
Si nous négligeons la saturation de l'acier, le flux magnétique peut être considéré comme proportionnel au courant dans l'enroulement de champ, qui est égal au courant dans l'armature. Par conséquent, pour un moteur à excitation séquentielle, la vitesse de rotation est inversement proportionnelle au courant dans l'induit et le nombre de tours diminue fortement avec l'augmentation de la charge, c'est-à-dire que le moteur a une caractéristique de vitesse douce. Au fur et à mesure que la charge diminue, le régime moteur augmente. Au ralenti ( je i ≈ 0) le régime moteur augmente indéfiniment, c'est-à-dire que le moteur passe en prise.
Ainsi, une propriété caractéristique des moteurs à excitation série est l'inadmissibilité du délestage, c'est-à-dire au ralenti ou à faible charge. Le moteur a une charge minimale admissible de 25 à 30 % de la charge nominale. Lorsque la charge est inférieure à la vitesse minimale admissible du moteur augmente fortement, ce qui peut entraîner sa destruction. Par conséquent, dans les cas où des chutes ou des réductions de charge soudaines sont possibles, il est impossible d'utiliser des moteurs à excitation en série.
Dans les moteurs de très petites puissances, le délestage ne provoque pas d'emballement, puisque les pertes mécaniques du moteur seront pour lui une charge mécanique suffisamment importante.
Le couple du moteur à excitation séquentielle, compte tenu relation proportionnelle entre Flux magnétique et le courant dans l'induit (Φ = с ′ je i) peut être défini par l'expression suivante :
M e = kΦ je je = k′ je 2e, (153)
où avec′ Et k ′ sont des constantes ; k = k· C , c'est-à-dire que le couple est proportionnel au carré du courant. Cependant, à des courants élevés, la saturation de l'acier affecte et la dépendance du moment se rapproche d'une ligne droite. Ainsi, les moteurs de ce type développent des couples importants à basse vitesse, ce qui est indispensable lors du démarrage de grandes masses inertielles et lors de surcharges. Ces moteurs sont largement utilisés dans les applications de transport et de levage.
Avec une excitation mixte, il est possible d'activer à la fois la concordance et la contre-allumage des enroulements d'excitation.
Les moteurs à enroulements opposés ne sont pas largement utilisés, car ils ont de mauvaises propriétés de démarrage et fonctionnent de manière instable.
Les caractéristiques de vitesse des moteurs à excitation mixte occupent une position intermédiaire entre les caractéristiques des moteurs à excitation parallèle et série. Avec une augmentation du courant dans l'induit, le nombre de tours de l'induit diminue plus que dans les moteurs à excitation parallèle, en raison d'une augmentation du flux magnétique provoquée par une augmentation du courant dans l'enroulement d'excitation série. Au ralenti, le moteur à excitation mixte ne passe pas en écartement, puisque le flux magnétique ne diminue pas jusqu'à zéro du fait de la présence d'un bobinage d'excitation parallèle.
Avec une augmentation de la charge dans les moteurs à excitation mixte, une augmentation du flux magnétique se produit et le couple augmente plus que dans les moteurs à excitation parallèle, mais dans une moindre mesure que dans les moteurs à excitation série.
Classification et équations de base des moteurs à courant continu
Les moteurs à courant continu sont largement utilisés dans les cas où les conditions de fonctionnement de l'actionneur nécessitent un grand changement de vitesse et présentent en même temps souvent des avantages par rapport aux moteurs. courant alternatif... Ils sont utilisés dans l'industrie métallurgique, l'industrie des machines-outils, les systèmes de contrôle automatique et sont largement utilisés dans le transport électrique, l'aviation et la construction automobile. Les moteurs à courant continu peuvent aller de quelques watts à plusieurs milliers de kilowatts.
Comme les générateurs, les moteurs à courant continu sont classés en fonction de la façon dont l'enroulement de champ est activé. Il existe des moteurs à excitation indépendante, parallèle, séquentielle et mixte. Circuits électriques de ces moteurs sont similaires à ceux des générateurs correspondants. La différence est que le courant d'induit je un dans les moteurs d'excitation indépendante et en série est égal au courant du secteur je, et dans les moteurs à excitation parallèle et mixte, le courant d'excitation est également consommé par le réseau je v.
Considérez les équations de base des moteurs à courant continu.
1. Equation d'équilibre de tension pour le circuit d'induit en mode moteur :
L'équation est simplifiée de la même manière que pour les générateurs :
![]() (24.2)
(24.2)
2. Équation du bilan de courant pour les moteurs à excitation parallèle et mixte :
3. Équation du mouvement :
 (24.4)
(24.4)
où J- moment d'inertie de l'armature du moteur et des parties tournantes du mécanisme d'entraînement ; M- couple électromagnétique développé par le moteur, M avec- moment résistant égal à la somme des moments du mécanisme entraîné M2 et couple de freinage Mo, causés par des pertes à l'intérieur du moteur lui-même.
L'équation pour la vitesse du moteur peut être obtenue si dans (24.2) nous substituons sa valeur au lieu de l'EMF
Résoudre l'équation résultante par rapport à m avoir
![]() (24.5)
(24.5)
Caractéristiques des moteurs à courant continu
Les principales caractéristiques permettant d'évaluer les performances des moteurs sont :
voie express- la dépendance de la fréquence de rotation au courant d'induit,
momentané- la dépendance du moment électromagnétique au courant d'induit,
mécanique- dépendance de la vitesse de rotation sur le couple électromagnétique, n = f (M).
Moteurs à excitation indépendants et parallèles. Toutes les caractéristiques de ces moteurs sont obtenues à des valeurs constantes de la tension secteur et du courant de champ, correspondant généralement à leurs valeurs nominales : U = Unom; Je B = je dans non.
1. Caractéristique de vitesse n = f (I a). L'expression qui détermine cette caractéristique est l'équation (24.5). Comme il ressort de cette équation, si le circuit magnétique du moteur est non saturé et le flux magnétique = const, alors la dépendance n (je suis) linéaire et avec une augmentation du courant d'induit, la fréquence de rotation diminue. Ce cas correspond au trait plein de la Fig. 24.1.
Le flux d'induit provoque une diminution du flux d'excitation (), alors l'expression de la fréquence de rotation aura la forme
 (24.6)
(24.6)
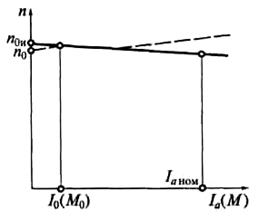
Graphique 24.1. Caractéristique de vitesse (mécanique) du moteur d'excitation indépendant
où 0 est le flux magnétique correspondant au courant nominal d'excitation 1 dans nom au ralenti du moteur ; - une diminution du flux magnétique due à l'effet démagnétisant de la réaction d'induit.
Comme il ressort de la formule (24.5), avec une augmentation du courant d'induit à la suite d'une chute de tension, la fréquence de rotation N.-É. diminue, et avec une diminution du flux Ф - augmente. Ceci est montré dans la Fig. 24.1 avec une ligne pointillée.
Si la valeur relative de la résistance totale du circuit d'induit est supérieure à la valeur relative de la diminution du flux, alors la vitesse de rotation diminuera avec l'augmentation du courant d'induit. Si< , то частота вращения с ростом тока якоря будет увеличиваться и такая характеристика будет неустойчивой.
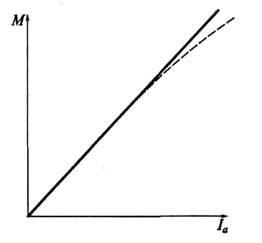
2. Caractéristique du moment M = f (I a). Analytiquement, cette caractéristique est décrite par la formule
Comme il ressort de cette équation, si le circuit magnétique du moteur est non saturé et le flux magnétique = const, alors la dépendance M (1 un) linéaire et avec une augmentation du courant d'induit, le moment électromagnétique augmente proportionnellement. La caractéristique de couple dans ce cas correspond à celle illustrée à la Fig. 24.2 une ligne droite continue partant de l'origine.
La caractéristique de moment réelle due à une diminution du flux magnétique due à l'action démagnétisante de la réaction d'induit () s'écartera d'une ligne droite (ligne pointillée sur la figure 24.2).
3. Caractéristiques mécaniques n = f (M). Une expression analytique de la caractéristique mécanique peut être obtenue à partir de l'équation (24.6), si nous y exprimons le courant d'induit 1 un par le moment électromagnétique (). Puis
Riz. 24.2. Caractéristique du moment du moteur d'excitation indépendant (parallèle)
De l'équation (24.7), il s'ensuit que la caractéristique mécanique du moteur a la même forme que celle de la vitesse, c'est-à-dire montré dans la Fig. 24.1 la caractéristique de vitesse sur une échelle différente sera la caractéristique mécanique.
Fonctionnement du moteur à je un= 0 et M= 0 est appelé ralenti idéal. D'après l'équation (24.7), le régime de ralenti
![]() (24.8)
(24.8)
Dans les moteurs à excitation indépendante, le changement de vitesse lors du passage du ralenti (M = M 0)à la charge nominale (M = M nom) n'est que de 2 ... 5%. De telles caractéristiques mécaniques et de vitesse à faible chute sont appelées rigides.
Moteurs à excitation séquentielle et mixte. Une caractéristique d'un moteur à excitation série est que son courant d'excitation est égal au courant d'induit (I B = I a), et par conséquent, pour dériver des expressions qui déterminent la forme de ses caractéristiques, il est d'abord nécessaire de déterminer la relation entre le flux magnétique et le courant d'induit Je a = je c. Dépendance Ф = f (je un) appelée caractéristique magnétique. La caractéristique magnétique idéale (sans tenir compte de l'effet démagnétisant de la réaction d'induit) est illustrée à la Fig. 24.3 par un trait plein, et le réel (compte tenu de la réaction de l'armature) - par un trait pointillé.

Riz. 24.3. Caractéristique magnétique d'un moteur à entraînement séquentiel
Toutes les caractéristiques d'un moteur à excitation série sont obtenues à courant continu alimentation (généralement avec U = U H 0 M).
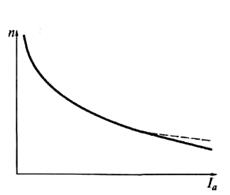
1. Caractéristique de vitesse N.-É.= f (je a). En substituant dans l'équation (24.5) l'expression du flux dépendant du courant d'induit en fonction de la caractéristique magnétique, on obtient la formule de la caractéristique de vitesse du moteur. Pour simplifier l'analyse, nous négligeons la saturation du circuit magnétique et supposons que la caractéristique magnétique est linéaire :
24.4. Caractéristique de vitesse du moteur à excitation série

Graphique 24.5. Caractéristique du moment du moteur à excitation série
Ensuite, en substituant l'expression (24.9) dans l'équation (24.5), nous obtenons
De l'équation (24.10), il s'ensuit que la caractéristique de vitesse a une forme hyperbolique ; sur la figure 24.4, il est représenté par une ligne continue. Une caractéristique de la caractéristique de vitesse d'un moteur à excitation séquentielle est sa grande pente dans la région des petites valeurs du courant d'induit. L'équation (24.10) implique également que l'axe des ordonnées (axe N.-É.) est une asymptote de cette caractéristique.
La caractéristique de vitesse réelle, en tenant compte de l'action démagnétisante de la réaction d'induit, s'écartera de la courbe hyperbolique vers le haut, comme le montre la ligne pointillée sur la Fig. 24.4.
2. Caractéristique du moment M-f (I a). En substituant l'expression (24.9) dans l'équation du couple, on obtient la formule du couple électromagnétique d'un moteur à excitation séquentielle :
![]() (24.11)
(24.11)
Il résulte de l'expression que le couple électromagnétique du moteur à excitation séquentielle est proportionnel au carré du courant d'induit, c'est-à-dire le moment caractéristique est parabolique ; sur la figure 24.5, il est représenté par une ligne continue. Compte tenu de l'action démagnétisante de la réaction d'induit, le moment dans la région des courants élevés sera inférieur au moment obtenu par l'expression (24.11) (ligne pointillée sur la figure 24.5).
3. Caractéristique mécanique n = f (M). De l'expression (24.11) le courant d'induit
![]() (24.12)
(24.12)
Ensuite, en substituant (24.12) dans (24.10), on obtient une expression analytique de la caractéristique mécanique :
De l'expression (24.13), il s'ensuit que la caractéristique mécanique du moteur à excitation séquentielle à U = const, ainsi que sa caractéristique de vitesse, a une forme presque hyperbolique (Fig. 24.6).

Riz. 24.6. Caractéristique mécanique d'un moteur à excitation série
Une caractéristique des caractéristiques mécaniques d'un moteur à excitation séquentielle est sa forte pente dans la région des petites valeurs du courant d'induit. L'équation (24.13) implique également que l'axe des ordonnées (axe N.-É.) est l'asymptote de cette caractéristique.
Lorsque le régime moteur tend vers l'infini. Dans ce cas, le moteur est dit colportant. Une augmentation excessive de la vitesse de rotation est dangereuse pour la résistance mécanique de l'armature, car en raison des valeurs élevées des forces centrifuges qui se produisent dans ce cas, l'intégrité des bandes maintenant l'enroulement de l'armature peut être perturbée, et le le collecteur peut être détruit. Par conséquent, il est impossible d'autoriser le fonctionnement du moteur à excitation séquentielle au ralenti et à faible charge, c'est-à-dire que la charge ne doit pas être inférieure à 25 ... 31 % de la valeur nominale. Seuls les moteurs de faible puissance (dizaines de watts) sont autorisés à fonctionner au ralenti, car leur propre moment de perte M 0 assez gros.
En raison de la forte dépendance de la vitesse à la charge, les caractéristiques mécaniques et de vitesse des moteurs à excitation séquentielle sont dites douces.
Les caractéristiques des moteurs à excitation mixte sont intermédiaires entre les caractéristiques correspondantes des moteurs à excitation parallèle et série. Avec un enroulement série faible, ils approcheront les caractéristiques d'un moteur à excitation parallèle et avec un moteur puissant, les caractéristiques d'un moteur à excitation séquentielle.
Comparaison des caractéristiques du moteur. Les moteurs à excitation parallèle (indépendants) ont une caractéristique mécanique rigide et sont donc utilisés dans les installations où il est nécessaire de maintenir une vitesse de rotation constante lorsque le couple de charge change, par exemple dans les machines-outils, les laminoirs, les ventilateurs, etc. Ils sont également largement utilisés lorsqu'un contrôle de la vitesse sur une large plage est requis. Dans ce cas, la tension appliquée à l'induit du moteur varie sur une large plage, tandis que la tension d'excitation reste inchangée.
Dans les moteurs à excitation série, le couple électromagnétique a une dépendance quadratique du courant d'induit, par conséquent, leur utilisation est préférable lorsque des moments de démarrage importants sont requis et que des surcharges de couple fréquentes sont observées. Cela est dû au fait qu'avec les mêmes fluctuations du moment résistant, la consommation de courant et de puissance dans les moteurs à excitation série change nettement moins que dans les moteurs à excitation parallèle. Les moteurs à excitation séquentielle sont largement utilisés dans les véhicules électriques et les appareils de levage.
Les moteurs à courant continu ne sont pas utilisés aussi souvent que les moteurs à courant alternatif. Vous trouverez ci-dessous leurs avantages et inconvénients.
Dans la vie de tous les jours, les moteurs à courant continu sont utilisés dans les jouets pour enfants, car les batteries sont utilisées comme sources d'alimentation. Ils sont utilisés dans les transports : dans le métro, les tramways et trolleybus, les voitures. Au entreprises industrielles Les moteurs électriques à courant continu sont utilisés dans les entraînements d'unités, pour une alimentation électrique ininterrompue dont les batteries rechargeables sont utilisées.
Conception et maintenance de moteurs à courant continu
L'enroulement principal du moteur à courant continu est ancre connexion à l'alimentation via appareil à brosse... L'armature tourne dans un champ magnétique créé par pôles du stator (enroulements de champ)... Les parties d'extrémité du stator sont recouvertes de boucliers avec des roulements dans lesquels tourne l'arbre d'induit du moteur. D'une part, sur le même arbre est installé ventilateur refroidissement, qui entraîne le flux d'air à travers les cavités internes du moteur pendant son fonctionnement.
Le jeu de balais est un élément vulnérable dans la conception du moteur. Les brosses sont frottées contre le collecteur afin de répéter sa forme le plus fidèlement possible, elles sont plaquées contre lui avec un effort constant. En cours de fonctionnement, les balais s'usent, la poussière conductrice d'eux se dépose sur les pièces fixes, elle doit être enlevée périodiquement. Les balais eux-mêmes doivent parfois être déplacés dans les rainures, sinon ils s'y coincent sous l'influence de la même poussière et « pendent » au-dessus du collecteur. Les caractéristiques du moteur dépendent également de la position des balais dans l'espace dans le plan de rotation de l'induit.
Avec le temps, les balais s'usent et doivent être remplacés. Le collecteur aux points de contact avec les balais est également abrasé. Périodiquement, l'ancre est démontée et le collecteur est rectifié sur un tour. Après perçage, l'isolant entre les lamelles du collecteur est coupé à une certaine profondeur, car il plus fort que le matériel collecteur et avec un développement ultérieur détruira les brosses.
Circuits de commutation de moteur à courant continu
Enroulements d'excitation - trait distinctif Machines à courant continu. Les propriétés électriques et mécaniques du moteur électrique dépendent de la façon dont ils sont connectés au réseau.
Excitation indépendante
L'enroulement d'excitation est connecté à une source indépendante. Les caractéristiques du moteur sont les mêmes que pour le moteur avec aimants permanents... La vitesse de rotation est contrôlée par la résistance dans le circuit d'induit. Il est également régulé par un rhéostat (résistance de commande) dans le circuit d'enroulement d'excitation, mais avec une diminution excessive de sa valeur ou avec une coupure, le courant d'induit augmente jusqu'à des valeurs dangereuses. Les moteurs à excitation séparée ne doivent pas être démarrés au ralenti ou avec une faible charge sur l'arbre. La vitesse de rotation augmentera considérablement et le moteur sera endommagé.

Les autres circuits sont appelés circuits d'auto-excitation.
Excitation parallèle
Le rotor et les enroulements de champ sont connectés en parallèle à la même alimentation. Avec cette connexion, le courant traversant l'enroulement de champ est plusieurs fois inférieur à celui traversant le rotor. Les caractéristiques des moteurs électriques sont robustes, ce qui leur permet d'être utilisés pour entraîner des machines et des ventilateurs.
Le contrôle de la vitesse de rotation est assuré en connectant des rhéostats au circuit rotorique ou en série avec l'enroulement d'excitation.

Excitation séquentielle
L'enroulement d'excitation est connecté en série avec l'induit, le même courant les traverse. Le régime d'un tel moteur dépend de sa charge, il ne peut pas être mis en marche au ralenti. Mais il a de bonnes caractéristiques de démarrage, de sorte que le circuit d'excitation en série est utilisé dans les véhicules électrifiés.
Excitation mitigée
Dans ce schéma, deux enroulements de champ sont utilisés, situés par paires à chacun des pôles du moteur électrique. Ils peuvent être connectés de manière à ce que leurs flux soient soit additionnés, soit soustraits. De ce fait, le moteur peut avoir les caractéristiques d'un circuit d'excitation série ou parallèle.

Pour changer le sens de rotation changer la polarité de l'un des enroulements de champ. Pour contrôler le démarrage du moteur électrique et la vitesse de sa rotation, une commutation pas à pas des résistances est utilisée.










