Moteur à courant continu avec principe de fonctionnement à excitation indépendante. Caractéristiques mécaniques et méthodes de contrôle de la vitesse des moteurs à courant continu à excitation série et mixte
Excitation du moteur courant continu est un trait distinctif de tels moteurs. Les caractéristiques mécaniques des machines électriques à courant continu dépendent du type d'excitation. L'excitation peut être parallèle, sérielle, mixte et indépendante. Le type de moyen d'excitation dans lequel les enroulements d'induit et de rotor sont activés.
Avec une excitation parallèle, les enroulements d'induit et de rotor sont connectés en parallèle les uns aux autres à la même source de courant. Étant donné que l'enroulement d'excitation a plus de tours que l'enroulement d'induit, le courant qui y circule est insignifiant. Dans le circuit, à la fois l'enroulement du rotor et l'enroulement d'induit, les résistances de réglage peuvent être activées.
Figure 1 - Schéma d'excitation parallèle d'une machine à courant continu
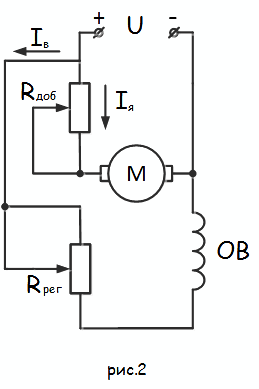
L'enroulement d'excitation peut également être connecté à une source de courant séparée. Dans ce cas, l'excitation sera dite indépendante. Les performances d'un tel moteur seront similaires à celles d'un moteur à aimant permanent. Vitesse de rotation du moteur s excitation indépendante, comme dans le cas d'un moteur à excitation parallèle, dépend du courant d'induit et du courant principal Flux magnétique... Le flux magnétique principal est généré par l'enroulement du rotor.
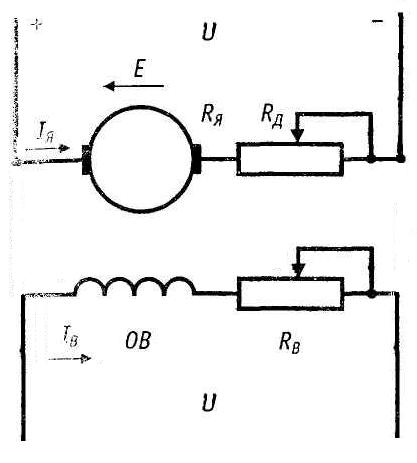
Figure 2 - Schéma d'excitation indépendante d'une machine à courant continu
La vitesse de rotation peut être ajustée à l'aide d'un rhéostat inclus dans le circuit d'induit, modifiant ainsi le courant dans celui-ci. Vous pouvez également régler le courant d'excitation, mais soyez prudent ici. Car s'il est excessivement réduit ou totalement absent, à la suite d'une rupture du fil d'alimentation, le courant dans l'armature peut augmenter jusqu'à des valeurs dangereuses.
De plus, avec une faible charge sur l'arbre ou au ralenti, la vitesse de rotation peut augmenter tellement qu'elle peut entraîner une destruction mécanique du moteur.
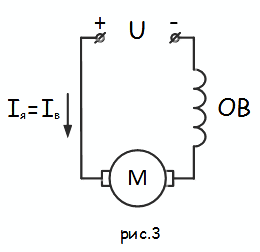
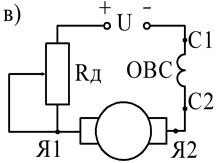
Si l'enroulement d'excitation est connecté en série avec l'induit, une telle excitation est dite séquentielle. Dans ce cas, le même courant traverse l'armature et l'enroulement d'excitation. Ainsi, le flux magnétique change avec la variation de la charge du moteur. Par conséquent, la vitesse du moteur dépendra de la charge.
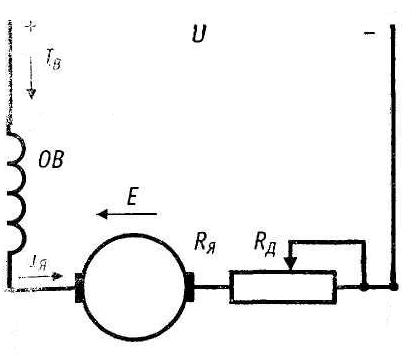
Figure 3 - schéma excitation séquentielle Machines à courant continu
Les moteurs avec une telle excitation ne doivent pas être démarrés au ralenti ou avec une faible charge sur l'arbre. Ils sont utilisés si un couple de démarrage important ou la capacité de résister à des surcharges à court terme est requis.
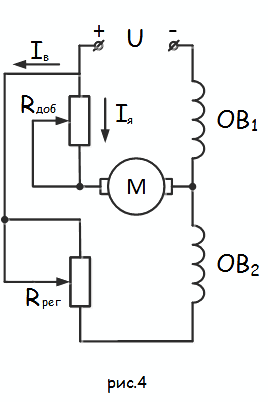
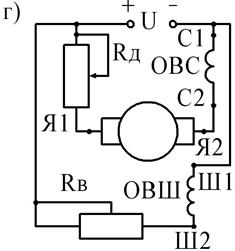
L'excitation mixte utilise des moteurs qui ont deux enroulements à chaque pôle. Ils peuvent être activés pour que les flux magnétiques soient à la fois ajoutés et soustraits.
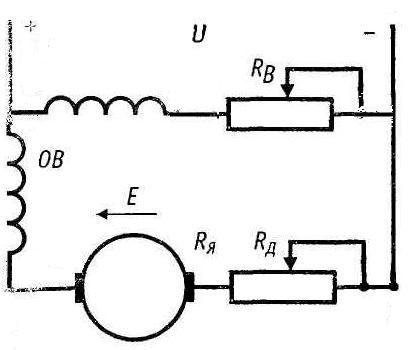
Figure 4 - Circuit d'excitation mixte d'une machine à courant continu
Selon la manière dont les flux magnétiques sont liés, le moteur avec une telle excitation peut fonctionner comme un moteur avec une série et un moteur avec une excitation parallèle. Tout dépend de la situation, si un moment de démarrage important est nécessaire, une telle machine fonctionne sur le mode de l'inclusion cohérente des enroulements. Si tu as besoin vitesse constante rotation, avec une charge changeant dynamiquement, la mise en marche opposée des enroulements est utilisée.
Dans les machines à courant continu, le sens de déplacement du rotor peut être modifié. Pour ce faire, il est nécessaire de changer le sens du courant dans l'un des enroulements. Ancre ou excitation. En inversant la polarité, le sens de rotation du moteur ne peut être atteint que dans un moteur à excitation indépendante ou qui utilise un aimant permanent. Dans d'autres schémas de commutation, vous devez commuter l'un des enroulements.
Le courant de démarrage dans une machine à courant continu est suffisamment important, il doit donc être démarré avec un rhéostat supplémentaire pour éviter d'endommager les enroulements.
Ministère de l'Éducation et des Sciences de la Fédération de Russie
GOU VPO Université d'État de l'Oural du Sud
Agence à Zlatoust
Moteurs à courant continu
ZD-431.583.270102
Complété par : Yu.R. Sharipova
Groupe : ZD-431
Vérifié par : Rumyantsev, E.
1. Introduction
2. Le dispositif et le principe de fonctionnement des moteurs à courant continu
3. Démarrage des moteurs
4. Données techniques des moteurs
5. Efficacité des moteurs à courant continu
6 caractéristiques du moteur à courant continu
6.1 Performances
6.2 Caractéristiques mécaniques
7. Liste de la littérature utilisée
1. Introduction
Les machines électriques à courant continu sont largement utilisées dans diverses industries.
La distribution importante des moteurs à courant continu s'explique par leurs qualités précieuses : couples de démarrage, de freinage et de surcharge élevés, vitesse relativement élevée, ce qui est important pour l'inversion et le freinage, la possibilité d'une régulation large et douce de la vitesse.
Les moteurs à courant continu sont utilisés pour les entraînements variables, par exemple pour les entraînements de diverses machines-outils et mécanismes. La puissance de ces moteurs électriques atteint des centaines de kilowatts. Dans le cadre de l'automatisation du contrôle des processus et des mécanismes de production, le domaine d'application des moteurs à courant continu de faible puissance à usage général avec une capacité allant de l'unité à la centaine de watts s'étend.
Selon le circuit d'alimentation, les enroulements d'excitation d'une machine à courant continu sont divisés en plusieurs types (à excitation indépendante, parallèle, série et mixte).
La production annuelle des machines à courant continu dans la Fédération de Russie est nettement inférieure à celle des machines à courant alternatif, ce qui est dû au coût élevé des moteurs à courant continu.
Au début, les machines à courant continu ont été créées. Par la suite, ils ont été largement supplantés par les machines à courant alternatif. En raison de la possibilité d'une régulation douce et économique de la vitesse de rotation, les moteurs à courant continu conservent leur rôle dominant dans le transport, pour l'entraînement des machines métallurgiques, dans les grues et les mécanismes de levage et de transport. Dans les systèmes d'automatisation, les machines à courant continu sont largement utilisées comme moteurs exécutifs, moteurs pour entraîner des mécanismes d'auto-enregistrement sur bande, comme génératrices tachymétriques et amplificateurs de machines électriques.
2... Le dispositif et le principe de fonctionnement des moteurs à courant continu
Le dispositif des machines à courant continu (générateurs et moteurs) sous une forme simplifiée est illustré à la Fig. 1. Les 2 pôles principaux et les 4 pôles supplémentaires sont fixés au châssis en acier 1 du stator de la machine. Sur les pôles principaux se trouve un enroulement d'excitation 3, sur l'autre - un enroulement de pôles supplémentaires 5. L'enroulement d'excitation crée un flux magnétique de la machine.
Fig. 1
Un circuit magnétique cylindrique 6 est fixé sur l'arbre moteur 10, dans les rainures duquel se trouve l'enroulement d'induit 7. Les tronçons d'enroulement d'induit sont fixés au collecteur 9. Des balais fixes sont pressés contre lui par des ressorts 8. Le collecteur fixé à l'arbre moteur est constitué d'une rangée de plaques de cuivre isolées les unes des autres. À l'aide d'un collecteur et de balais, l'enroulement d'induit est connecté à un circuit électrique externe. Dans les moteurs, ils servent en outre à convertir la constante de circuit externe dans le sens du courant en un courant directionnel dans les conducteurs de l'enroulement d'induit.
Des pôles supplémentaires avec un enroulement situé sur eux réduisent les étincelles entre les balais et le collecteur de la machine. L'enroulement des pôles supplémentaires est connecté en série avec l'enroulement d'induit et n'est souvent pas représenté sur les schémas électriques.
Pour réduire les pertes de puissance, le circuit magnétique d'induit est constitué de tôles d'acier séparées. Tous les enroulements sont faits de fil isolé.En plus des moteurs à deux pôles principaux, il existe des machines à courant continu à quatre pôles principaux ou plus. Dans ce cas, le nombre de pôles et de jeux de brosses supplémentaires augmente en conséquence.
Si le moteur est connecté à un réseau à tension constante, lorsque le champ magnétique créé par l'enroulement d'excitation interagit avec le courant dans les conducteurs d'induit, un couple apparaît qui agit sur l'induit :
![]() (1)
(1)
où KM est un coefficient qui dépend des paramètres de conception de la machine ; Ф - flux magnétique d'un pôle; IЯ - courant d'induit.
Si le couple du moteur à n = 0 dépasse le couple de freinage avec lequel le moteur est chargé, alors l'induit commencera à tourner. Avec une augmentation de la fréquence de rotation n, la CEM induite dans l'armature augmente. Cela conduit à une diminution du courant d'induit:
![]() (3)
(3)
où rЯ est la résistance de l'armature.
La conséquence d'une diminution du courant IЯ est une diminution du couple moteur. Lorsque les moments du moteur et de la charge sont égaux, la vitesse cesse de changer.
Le sens du couple moteur et, par conséquent, le sens de rotation de l'induit dépendent du sens du flux magnétique et du courant dans les conducteurs de l'enroulement d'induit. Pour changer le sens de rotation du moteur, vous devez changer le sens du courant d'induit ou du courant de champ.
3. Démarrage des moteurs
De la formule (3), il s'ensuit que dans le premier instant après la mise en marche du moteur vers le réseau de tension continue, c'est-à-dire quand et ,
Étant donné que la résistance rЯ est faible, le courant d'induit peut être 10 ... 30 fois supérieur au courant nominal du moteur, ce qui est inacceptable, car cela conduirait à de fortes étincelles et à la destruction du collecteur. De plus, avec un tel courant, un couple moteur trop élevé se produit et, avec des démarrages fréquents, une surchauffe de l'enroulement d'induit est possible.
Pour réduire le courant de démarrage dans le circuit d'induit, activez la résistance de démarrage, dont la résistance est réduite à zéro à mesure que la vitesse du moteur augmente. Si le démarrage du moteur est automatisé, la résistance de démarrage s'effectue en plusieurs étapes, qui sont désactivées en série à mesure que la vitesse augmente.
Courant de démarrage de l'induit
![]()
Au fur et à mesure que le moteur accélère, la force électromagnétique augmente dans l'enroulement d'induit et, comme suit de la formule (3), cela entraîne une diminution du courant d'induit IЯ. Par conséquent, à mesure que la vitesse du moteur augmente, la résistance dans le circuit d'induit diminue. Afin d'obtenir un couple de démarrage important avec un courant de démarrage relativement faible, le moteur est démarré avec le flux magnétique le plus élevé. Par conséquent, le courant d'excitation au démarrage doit être le maximum admissible, c'est-à-dire nominal.
4. Données techniques des moteurs
Les données techniques suivantes sont indiquées dans le passeport moteur et la documentation de référence pour les moteurs à courant continu : tension nominale Ui, puissance Pн, fréquence de rotation nн, courant Iн, rendement.
On entend par Un nominal la tension pour laquelle sont conçus l'enroulement d'induit et le collecteur, ainsi que, dans la plupart des cas, l'enroulement d'excitation parallèle. En tenant compte de la tension nominale, les matériaux isolants électriques du moteur sont sélectionnés.
Courant nominal Iн - le courant maximal admissible (consommé du réseau) auquel le moteur chauffe jusqu'à la température admissible la plus élevée, fonctionnant dans le mode (long terme, intermittent, court terme) pour lequel il est conçu :
![]()
où Iyan - courant d'induit à charge nominale ; Ivn - courant d'enroulement de champ à la tension nominale.
Il convient de noter que le courant d'excitation Ivn du moteur à excitation parallèle est relativement faible, par conséquent, à la charge nominale, il est généralement supposé
La puissance nominale н est la puissance développée par le moteur sur l'arbre pendant le fonctionnement avec une charge nominale (couple) et à une vitesse nominale nн.
La vitesse de rotation nн et le rendement correspondent au fonctionnement du moteur avec le courant Iн, la tension Un sans résistances supplémentaires dans les circuits du moteur.
Dans le cas général, la puissance à l'arbre P2, le moment M et la vitesse de rotation n sont liés par le rapport :
La puissance P1 consommée par le moteur du réseau, les valeurs de P2, rendement, U, I sont liées par les rapports :
Bien entendu, ces rapports sont également valables pour le fonctionnement nominal du moteur.
5. Efficacité des moteurs à courant continu
L'efficacité est l'indicateur le plus important des moteurs à courant continu. Plus il est grand, moins il y a de puissance P et de courant I consommés par le moteur du réseau à même puissance mécanique. De manière générale, la dépendance est la suivante :
![]() (9)
(9)
où est la perte dans l'enroulement d'induit ; - les pertes dans l'enroulement d'excitation ; - les pertes dans le circuit magnétique d'induit ; - les pertes mécaniques.
Les pertes de puissance sont indépendantes et peu dépendantes de la charge du moteur.
Les moteurs sont conçus de manière à ce que le rendement maximal se situe dans la zone proche de la puissance nominale. Le fonctionnement des moteurs à faible charge n'est pas souhaitable en raison des faibles valeurs de ra. Les valeurs de rendement des moteurs avec différentes méthodes d'excitation et une puissance de 1 à 100 kW à charge nominale sont différentes et en moyenne de 0,8.
6. Caractéristiques des moteurs à courant continu
6.1. Caractéristiques de performance
Les travailleurs sont appelés réglage, vitesse élevée, couple et efficacité. Caractéristiques.
Caractéristique de contrôle
La caractéristique de contrôle représente la dépendance de la vitesse de rotation P au courant d'excitation Iv dans le cas où le courant d'induit Ia et la tension du réseau U restent inchangés, soit n = f (Iv) avec Ia = const et U = const.
Jusqu'à ce que l'acier de l'entraînement magnétique de la machine soit saturé, le flux Ф change proportionnellement au courant d'excitation Iв. Dans ce cas, la caractéristique de contrôle est hyperbolique. A mesure de la saturation à des courants Iv élevés, la caractéristique tend vers le linéaire (Fig. 2). Aux faibles valeurs du courant Iw, la vitesse de rotation augmente fortement. Par conséquent, lorsque le circuit d'excitation du moteur est rompu (Iw = 0) avec une excitation parallèle, sa vitesse de rotation atteint des limites inacceptables, comme on dit : "Le moteur tourne à plein régime". Une exception peut être faite par les micromoteurs, qui ont un couple au ralenti relativement important М0.
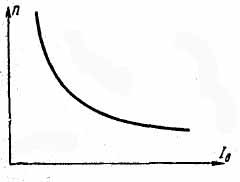
Riz. 2. Caractéristique de contrôle du moteur
Dans les moteurs à excitation séquentielle, Iv = Ia. Aux faibles charges, le courant d'induit Ia est faible et la vitesse de rotation peut être trop élevée, par conséquent, le démarrage et le fonctionnement à faibles charges sont inacceptables. Les micromoteurs sont les mêmes que. dans le cas précédent, peut constituer une exception.
Caractéristiques de vitesse.
Les caractéristiques de vitesse donnent la dépendance de la vitesse de rotation n à la puissance utile P2 sur l'arbre moteur dans le cas où la tension U du réseau et la résistance rv du rhéostat de commande du circuit d'excitation restent inchangées, soit n = f ( P2), avec U = const et rv = const ...
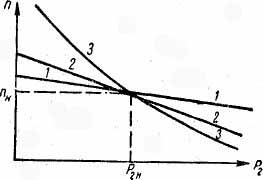
Riz. 3. Caractéristiques de vitesse
Avec une augmentation du courant d'induit avec une augmentation de la charge mécanique du moteur à excitation parallèle, la chute de tension dans l'induit augmente simultanément et une réaction d'induit apparaît, qui agit généralement de manière démagnétisante. La première raison tend à diminuer la vitesse de rotation du moteur, la seconde - à l'augmenter. L'action de chute de tension d'induit a généralement un impact plus important. Par conséquent, la caractéristique de vitesse du moteur à excitation parallèle a un caractère légèrement décroissant (courbe 1, Fig. 3).
Dans un moteur de champ en série, le courant d'induit est le courant de champ. De ce fait, la caractéristique de vitesse du moteur à excitation séquentielle a un caractère proche de l'hyperbole. Avec une charge croissante à mesure que le circuit magnétique sature, la caractéristique devient plus simple (courbe 3 sur la figure 3).
Dans un moteur composé, lorsque les enroulements sont connectés en accord, la caractéristique de vitesse prend une position intermédiaire entre les caractéristiques du moteur à excitation parallèle et série (courbe 2).
Caractéristiques du moment.
Les caractéristiques du moment montrent comment le moment M évolue avec une variation de la puissance utile P2 sur l'arbre du moteur, si la tension U du réseau et la résistance rv du rhéostat de commande dans le circuit d'excitation restent inchangées, c'est-à-dire M = f (P2) , avec U = const, rv = const.
Couple utile sur l'arbre moteur
Si la vitesse de rotation du moteur à excitation parallèle ne changeait pas avec la charge, alors la dépendance du moment Mmech à la puissance utile représenterait graphiquement une droite passant par l'origine. En effet, la vitesse de rotation diminue avec l'augmentation de la charge. Par conséquent, la caractéristique du couple utile est légèrement courbée vers le haut (courbe 2, Fig. 4). Dans ce cas, la courbe du moment électromagnétique M passe au-dessus de la courbe du moment utile Mmech d'une valeur constante égale au moment au repos M0 (courbe 1).
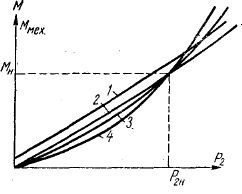
Riz. 4. Caractéristiques du moment
Dans un moteur à excitation séquentielle, la forme de la caractéristique de couple se rapproche de la parabole, puisque le changement de couple à partir du courant de charge se produit, selon la loi d'une parabole, jusqu'à ce que l'acier soit saturé. Avec la saturation, la dépendance devient plus simple (courbe 4). Dans un moteur composé, la caractéristique de couple (courbe 3) occupe une position intermédiaire entre les caractéristiques d'un moteur à excitation parallèle et série.
Caractéristique du changement dans l'efficacité.
La courbe de dépendance du rendement à la charge a une forme caractéristique de tous les moteurs (Fig. 5). La courbe passe par l'origine et croît rapidement à mesure que la puissance nette augmente jusqu'à 1/4 de la puissance nominale. A une puissance P2 égale à environ 2/3 de la valeur nominale, le rendement atteint généralement sa valeur maximale. Avec une augmentation de la charge au nominal, le rendement reste constant ou diminue légèrement.
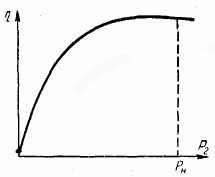
Riz. 5. Modification de l'efficacité du moteur
6.2 Caractéristiques mécaniques
La caractéristique la plus importante du moteur est le n mécanique (M). Il montre comment la vitesse du moteur dépend du couple développé. Si des tensions nominales sont fournies aux enroulements du moteur et qu'il n'y a pas de résistances supplémentaires dans ses circuits, le moteur a une caractéristique mécanique appelée naturelle. Sur la caractéristique naturelle, il y a un point correspondant aux données nominales du moteur (Mn, Pia, etc.). Si la tension sur l'enroulement d'induit est inférieure à la valeur nominale, ou Iv< Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
En transformant l'expression (3) par rapport à la fréquence de rotation, on obtient l'équation de la caractéristique électromécanique n (Iа) :
![]() (7)
(7)
Après avoir remplacé le courant Iя dans l'équation (7) selon la formule (1), on obtient l'équation de la caractéristique mécanique n (M) :
![]() (8)
(8)
Lorsque Ф = сnst, les caractéristiques électromécaniques n (Iya) et mécaniques n (M) du moteur à excitation parallèle sont des droites. Étant donné qu'en raison de la réaction de l'armature, le flux magnétique change légèrement, les caractéristiques sont en fait quelque peu différentes des lignes droites.
Au ralenti (M = 0), le moteur a un régime de ralenti déterminé par le premier terme de l'équation (8). Lorsque la charge augmente, n diminue. Comme il ressort de l'équation (8), cela est dû à la présence de la résistance d'induit rя.
Comme r n'est pas grand, la vitesse du moteur change peu avec l'augmentation du couple et le moteur a une caractéristique mécanique naturelle dure (Fig. 6, caractéristique 1).
De l'équation (8), il s'ensuit que la vitesse de rotation à une charge constante donnée (M = const) peut être contrôlée de trois manières :
a) une modification de la résistance du circuit d'induit ;
b) une modification du flux magnétique du moteur ;
c) une variation de la tension aux bornes de l'induit.
Riz. 6 Caractéristiques mécaniques
Pour contrôler la vitesse d'abord dans le circuit d'induit. une résistance supplémentaire rd doit être incluse. Ensuite, la résistance dans l'équation (8) doit être remplacée par ra + rд.
Comme il ressort de l'équation (8), la vitesse de rotation n est liée à la résistance du circuit d'induit rя + rd à charge constante (M = const) par une relation linéaire, c'est-à-dire à mesure que la résistance augmente, la vitesse diminue. Différentes résistances rd correspondent à différentes caractéristiques mécaniques artificielles, dont l'une est représentée sur la figure 2 (caractère 2). En utilisant la caractéristique 2 à un couple M1 donné, il est possible d'obtenir la vitesse de rotation n2.
Le changement de vitesse de la deuxième manière s'effectue à l'aide d'une source de tension réglable UD2. En modifiant sa tension avec le régulateur R2, il est possible de modifier le courant d'excitation I' et ainsi le flux magnétique du moteur. Comme on peut le voir à partir de l'équation (8), à charge constante (M = const), la fréquence de rotation est dans une dépendance complexe du flux magnétique F. L'analyse de l'équation (8) montre que dans une certaine gamme de changements dans le flux magnétique , une diminution de ce dernier entraîne une augmentation de la fréquence de rotation. C'est cette plage de débit qui est utilisée pour le contrôle de la vitesse.
Chaque valeur du flux magnétique correspond à une caractéristique mécanique artificielle du moteur, dont l'une est représentée sur la figure 2 (caractère 4). A l'aide de la caractéristique 4 à l'instant M1 il est possible d'obtenir la vitesse n4.
Pour réguler la vitesse en modifiant la tension aux bornes de l'induit, il est nécessaire de disposer d'une source de tension régulée relativement puissante. Chaque valeur de tension correspond à une caractéristique mécanique artificielle du moteur, dont l'une est représentée sur la figure 2 (caractère 3). A l'aide de la caractéristique 3 à un couple M1 donné, il est possible d'obtenir la vitesse de rotation n3.
Caractéristique statique du moteur. Obtention d'une caractéristique électromécanique naturelle. Etude des caractéristiques statiques et dynamiques dans un système électromécanique monomasse avec un moteur à courant continu à excitation indépendante.
Description du schéma du système G - D, sa structure et ses principaux éléments, son objectif. Calcul des processus électromagnétiques du régulateur de courant d'excitation du générateur d'impulsions. Calcul de la valeur moyenne du courant pour les valeurs données du rapport cyclique des impulsions de commande.
Le principe de fonctionnement et le dispositif du générateur de courant continu. Types d'enroulements d'induit. Méthodes pour exciter les générateurs à courant continu. Réversibilité des machines à courant continu. Moteur à excitation parallèle, indépendant, série et mixte.
Les principaux types de moteurs sont à deux temps et à quatre temps. La conception d'un moteur à combustion interne à deux temps. Principe d'allumage du moteur. L'histoire de la création et le principe de fonctionnement du moteur électrique. Méthodes pour exciter les moteurs à courant continu.
Calcul analytique d'un moteur à courant continu à collecteur avec excitation à partir d'aimants permanents en ferrite de baryum. Détermination des dimensions du moteur. Sélection de l'enroulement d'induit. Calcul des paramètres des collecteurs et des balais. Pertes et efficacité.
Le travail et la structure du moteur à courant continu. En faisant tourner le générateur de courant continu par une force externe, nous dépensons une certaine puissance mécanique Pmech, et dans le réseau nous obtenons la puissance électrique correspondante Rel.
Détermination des valeurs d'un certain nombre de caractéristiques de rotation du moteur. Calcul de l'amplitude des courants de commutation des étages de rhéostat. Expression graphique des caractéristiques électrodynamiques du moteur et des valeurs des vitesses de rotation. Schéma de connexion des résistances de démarrage.
Propriétés et caractéristiques d'une génératrice synchrone. Perte d'énergie lors de la conversion d'énergie mécanique en énergie électrique dans une génératrice synchrone. Stabilité et capacité de surcharge accrue du générateur. Caractéristiques du fonctionnement en parallèle du générateur.
Toutes les caractéristiques de performance d'un moteur à courant continu, comme un générateur, dépendent de la façon dont le circuit d'excitation est connecté par rapport au circuit d'induit. La connexion de ces circuits peut être parallèle, série, mixte et, enfin, ils peuvent être indépendants les uns des autres.
Moteurs à excitation parallèle.
Ici, l'enroulement de champ et l'enroulement d'induit sont connectés en parallèle. L'enroulement de champ a un plus grand nombre de tours que l'enroulement d'induit, de sorte que le courant de champ dans la plupart des cas est de quelques pour cent du courant d'induit. Un rhéostat de réglage peut être inclus dans le circuit d'enroulement de champ. Le rhéostat de démarrage PR est inclus dans le circuit d'induit.
Moteur à excitation indépendante.
Si l'enroulement de champ est connecté à une autre source de tension constante, nous obtenons un moteur à excitation indépendante. Les mêmes propriétés sont possédées par les moteurs électriques avec aimant permanent.
La caractéristique de vitesse des moteurs à excitation indépendante et parallèle est la dépendance de n
= f (Iа) à U = const et Iе = const, oùn - vitesse
Iя - courant d'induit
Iе - courant d'excitation.
Figure 8.5.4. Caractéristique de vitesse.
Un changement de vitesse de rotation peut se produire en raison d'un changement de charge et de flux magnétique. L'augmentation du courant de charge modifie de manière insignifiante la chute de tension interne en raison de la faible résistance du circuit d'induit et ne réduit donc que légèrement la vitesse du moteur. Quant au flux magnétique, du fait de la réaction de l'induit avec une augmentation du courant de charge, il diminue légèrement, ce qui entraîne une légère augmentation de la vitesse du moteur. Ainsi, la vitesse de rotation du moteur à excitation parallèle change très peu. Le régime moteur est déterminé par la formule :
n = (U - IяRя) / c ∙ Φ, où
c est un coefficient dépendant du dispositif de la machine.
La vitesse de rotation d'un moteur à excitation indépendante peut être contrôlée soit en modifiant la résistance dans le circuit d'induit, soit en modifiant le flux magnétique. Il est à noter qu'une diminution excessive du courant de champ et, surtout, une coupure accidentelle de ce circuit sont très dangereux pour les moteurs à excitation parallèle et indépendante, car le courant d'induit peut atteindre des valeurs inacceptablement élevées. Sous faible charge (ou au ralenti), la vitesse peut augmenter tellement qu'elle devient dangereuse pour l'intégrité du moteur.
Moteur excité en série.
Dans un tel moteur, le courant d'induit est simultanément le courant d'excitation, puisque l'enroulement d'excitation est connecté en série avec l'induit. Pour cette raison, le flux magnétique du moteur change avec la charge. Vitesse du moteur :
n = [U - Iя (Rа + Rв)] / c ∙ Φ, où
Rя - résistance d'induit
Rv est la résistance de l'enroulement d'excitation.
Caractéristique du régime moteur pos. excitation.
Ce graphique montre la caractéristique de vitesse d'un moteur à excitation série.
A partir de cette caractéristique, on peut voir que la vitesse du moteur est fortement dépendante de la charge. Avec une augmentation de la charge, la baisse de la résistance des enroulements augmente avec une augmentation simultanée du flux magnétique, ce qui entraîne une diminution importante de la vitesse de rotation. Par conséquent, de tels moteurs ne doivent pas être démarrés au ralenti ou à faible charge. Les moteurs à excitation série sont utilisés dans les cas où un couple de démarrage important ou la capacité de résister à des surcharges à court terme sont requis. Ils sont utilisés comme moteurs de traction dans les tramways, les trolleybus, les métros et les locomotives électriques, ainsi que sur les grues et pour le démarrage des moteurs à combustion interne (démarreurs).
Moteur à excitation mixte.
![]()
Sur chaque pôle d'un tel moteur, il y a deux enroulements - parallèle et série. Ils peuvent être activés pour que les flux magnétiques soient ajoutés (consonne) ou soustraits (activation du compteur). Formules de vitesse de rotation et de couple pour un tel moteur :
n = (U - Iя ∙ Rя) / c ∙ (Φpara. +/- l.)
М = c ∙ Iya ∙ (Φpara. +/- l.)
Selon le rapport des flux magnétiques, un moteur à excitation mixte dans ses propriétés se rapproche soit d'un moteur à excitation série, soit d'un moteur à excitation parallèle. En règle générale, dans de tels moteurs, l'enroulement série est l'enroulement principal (de travail) et l'enroulement parallèle est l'enroulement auxiliaire. Du fait de la présence du flux magnétique du bobinage parallèle, la vitesse d'un tel moteur ne peut pas augmenter fortement à faible charge. Les moteurs avec autorisation sont utilisés lorsqu'un couple de démarrage important et une régulation de la vitesse à des charges variables sont nécessaires. Les moteurs à enroulements opposés sont utilisés dans les cas où une vitesse constante est requise avec une charge variable.
Pour changer le sens de rotation d'un moteur à courant continu, il est nécessaire de changer le sens du courant soit dans l'enroulement d'excitation, soit dans l'enroulement d'induit. En changeant la polarité aux bornes de la machine, le sens de rotation ne peut être inversé que dans un aimant permanent ou un moteur excité indépendamment. Dans d'autres moteurs, le sens du courant doit être inversé soit dans l'enroulement d'induit, soit dans l'enroulement d'excitation. docteur moteur ne peut pas être allumé par une connexion à pleine tension. Le courant de démarrage des machines à courant continu est environ 20 fois supérieur au courant nominal (plus le moteur est gros et rapide, plus il est important). Dans les grosses machines, le courant de démarrage peut être 50 fois supérieur au courant nominal.
Le courant important provoque un arc de cercle dans le collecteur et détruit le collecteur. Pour la mise en marche, une augmentation progressive de la tension ou des rhéostats de démarrage sont utilisés. La connexion directe est autorisée à basse tension dans le cas de petits moteurs, dans lesquels la résistance de l'enroulement d'induit est grande.
Permet divers schémas de connexion. Selon la façon dont l'OB est allumé, les moteurs se distinguent par une excitation indépendante, avec une auto-excitation, qui est divisée en série, parallèle et mixte.
Moteur à excitation séparée
Dans le DCT avec excitation indépendante, l'enroulement d'excitation est connecté à une source d'alimentation séparée (Fig. 1). Cela peut être dû à des tensions d'excitation Uv et Uv du circuit d'induit différentes. Avec ce schéma de connexion, l'OB n'a aucune connexion électrique avec l'enroulement d'induit. Pour réduire les pertes dans le OF, et créer la MDS nécessaire, il est nécessaire de réduire le courant d'excitation en augmentant le nombre de spires. L'enroulement d'excitation est constitué d'un petit nombre de spires, de sorte que le courant Iw était de 2 ... 5% de Iya. Le choix de ce schéma d'excitation pour le moteur dépend des propriétés du variateur.
DPT avec excitation parallèle
En fait, le schéma de connexion de l'OF à excitation parallèle (Fig. 2) est similaire au circuit à excitation indépendante. Les propriétés du moteur sont les mêmes lorsqu'il est connecté selon les deux schémas. L'avantage de ce type de connexion est qu'il n'y a pas besoin d'une source d'alimentation séparée.
DPT avec excitation séquentielle
Lorsqu'il est connecté selon ce schéma, l'OB est connecté en série avec le circuit d'induit (Fig. 3), tandis que le courant d'induit est égal au courant d'excitation. A cet égard, l'OF est en fil épais. Ce schéma utilisé lorsqu'un couple de démarrage important est requis. Avec une diminution de la charge sur l'arbre inférieure à 25% de la valeur nominale, la vitesse de rotation augmente fortement et atteint des valeurs dangereuses pour le moteur. La caractéristique du DPT à excitation séquentielle est « douce ».
DPT avec une excitation mitigée
Le DPT à excitation mixte (Fig. 4) a deux OF, dont l'un est connecté en série et l'autre en parallèle Chaîne d'ancrage... Avec une connexion concordante des enroulements, avec une augmentation de la charge sur l'arbre, le flux magnétique augmente, ce qui entraîne une diminution de la vitesse de rotation. Avec une connexion opposée, le flux magnétique total diminue avec l'augmentation de la charge, ce qui entraîne une forte augmentation de la vitesse de rotation. Cela conduit le moteur à un mode de fonctionnement instable, par conséquent, l'enroulement en série est composé d'un petit nombre de tours, de sorte que lorsque la charge augmente, le flux magnétique diminue légèrement, stabilisant ainsi le fonctionnement du moteur.
Les moteurs à courant continu, en fonction des méthodes de leur excitation, comme déjà indiqué, sont divisés en moteurs avec un indépendant, parallèle(shunter), cohérent excitation (série) et mixte (composée).
Moteurs d'excitation indépendants, nécessitent deux alimentations (Figure 11.9, a). L'un d'eux est nécessaire pour alimenter le bobinage d'induit (conclusions I1 et I2), et l'autre - pour créer un courant dans l'enroulement d'excitation (l'enroulement conduit 1 et W2). Résistance supplémentaire chemin dans le circuit d'enroulement d'induit est nécessaire de réduire le courant de démarrage du moteur au moment où il est allumé.
Avec une excitation indépendante, des moteurs électriques principalement puissants sont fabriqués afin de réguler plus facilement et plus économiquement le courant d'excitation. La section transversale du fil d'enroulement de champ est déterminée en fonction de la tension de sa source d'alimentation. Une caractéristique de ces machines est l'indépendance du courant d'excitation, et par conséquent du flux magnétique principal, de la charge sur l'arbre du moteur.
Les moteurs à excitation indépendante dans leurs caractéristiques coïncident pratiquement avec les moteurs à excitation parallèle.
Moteurs à excitation parallèle sont allumés conformément au schéma illustré à la figure 11.9, b. Pinces I1 et I2 se référer à l'enroulement d'induit, et les pinces 1 et W2- au bobinage d'excitation (au bobinage shunt). Résistances variables chemin et camping-car sont destinés, respectivement, à modifier le courant dans l'enroulement d'induit et dans l'enroulement d'excitation. L'enroulement de champ de ce moteur est fait de un grand nombre se tourne fil de cuivre section transversale relativement petite et a une résistance significative. Cela lui permet d'être connecté à la pleine tension secteur spécifiée dans les données du passeport.
Une caractéristique de ce type de moteurs est que pendant leur fonctionnement, il est interdit de déconnecter l'enroulement d'excitation du circuit d'induit. Sinon, lorsque l'enroulement d'excitation est ouvert, une valeur EMF inacceptable y apparaîtra, ce qui peut entraîner une défaillance du moteur et des blessures au personnel de maintenance. Pour la même raison, le bobinage d'excitation ne doit pas être ouvert lorsque le moteur est arrêté, lorsque sa rotation n'est pas encore arrêtée.
Avec une augmentation de la vitesse de rotation, la résistance supplémentaire (supplémentaire) Rd dans le circuit d'induit doit être réduite et, lorsque la vitesse établie est atteinte, elle doit être complètement retirée.
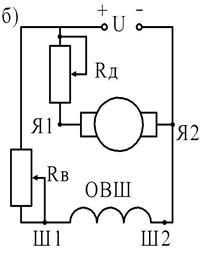
Graphique 11.9. Types d'excitation des machines à courant continu,
a - excitation indépendante, b - excitation parallèle,
c - excitation séquentielle, d - excitation mixte.
OVSh - enroulement d'excitation shunt, OVS - enroulement d'excitation série, "OVN - enroulement d'excitation indépendant, Rd - résistance supplémentaire dans le circuit d'enroulement d'induit, Rv - résistance supplémentaire dans le circuit d'enroulement d'excitation.
L'absence de résistance supplémentaire dans l'enroulement d'induit au moment du démarrage du moteur peut conduire à l'apparition d'un courant de démarrage important dépassant le courant d'induit nominal en 10 ... 40 fois .
Une propriété importante d'un moteur à excitation parallèle est sa fréquence de rotation presque constante lorsque la charge sur l'arbre d'induit change. Ainsi, lorsque la charge passe du ralenti à la valeur nominale, la vitesse de rotation ne diminue que de (2.. 8)% .
La deuxième caractéristique de ces moteurs est le contrôle de vitesse économique, dans lequel le rapport de la vitesse la plus élevée à la vitesse la plus basse peut être 2:1 , et avec une version spéciale du moteur - 6:1 ... La vitesse de rotation minimale est limitée par la saturation du circuit magnétique, qui ne permet pas déjà une augmentation du flux magnétique de la machine, et la limite supérieure de la vitesse de rotation est déterminée par la stabilité de la machine - avec un affaiblissement important de le flux magnétique, le moteur peut "se déchaîner".
Moteurs à excitation série(série) sont allumés selon le schéma (Figure 11.9, c). conclusions C1 et C2 correspondent à un enroulement de champ série (série). Il est constitué d'un nombre relativement réduit de spires de fil principalement de cuivre de grande section. L'enroulement d'excitation est connecté en série avec l'enroulement d'induit... Résistance supplémentaire chemin dans le circuit d'enroulement d'induit et d'excitation permet de réduire le courant de démarrage et de réguler la vitesse du moteur. Au moment où le moteur est allumé, il doit avoir une valeur à laquelle le courant de démarrage sera (1,5 ... 2,5) Dans... Une fois que le moteur atteint une vitesse constante, une résistance supplémentaire chemin s'affiche, c'est-à-dire mis à zéro.
Ces moteurs, au démarrage, développent des couples de démarrage élevés et doivent être démarrés à une charge d'au moins 25 % de sa valeur nominale. Allumer le moteur avec moins de puissance sur son arbre, et encore plus au ralenti, n'est pas autorisé. Sinon, le moteur peut développer des régimes trop élevés, ce qui entraînera sa panne. Les moteurs de ce type sont largement utilisés dans les mécanismes de transport et de levage, dans lesquels il est nécessaire de modifier la vitesse sur une large plage.
Moteurs à excitation mixte(composé), occupent une position intermédiaire entre les moteurs d'excitation parallèle et série (Figure 11.9, d). Leur grande appartenance à l'un ou l'autre type dépend du rapport des parties du champ d'excitation principal, créé par des enroulements d'excitation en parallèle ou en série. Au moment où le moteur est allumé pour réduire le courant de démarrage, une résistance supplémentaire est incluse dans le circuit d'enroulement d'induit chemin... Ce moteur a de bonnes caractéristiques de traction et peut tourner au ralenti.
La mise en marche directe (rhéostatique) des moteurs à courant continu de tous les types d'excitation est autorisée avec une puissance ne dépassant pas un kilowatt.
Désignation de la machine à courant continu
Actuellement, les plus répandues sont les machines à courant continu à usage général de la série 2P et la série la plus récente 4P. En plus de ces séries, des moteurs sont produits pour les grues, les excavatrices, les entraînements métallurgiques et autres de la série. RÉ. Les moteurs sont également fabriqués en séries spécialisées.
Moteurs de série 2P et 4P subdivisé le long de l'axe de rotation, comme il est d'usage pour les moteurs asynchrones courant alternatif séries 4A... Série de machines 2P ont 11 dimensions, différant par la hauteur de rotation de l'axe de 90 à 315 mm. La plage de puissance de cette série est de 0,13 à 200 kW pour moteurs électriques et de 0,37 à 180 kW pour les générateurs. Les moteurs des séries 2P et 4P sont conçus pour des tensions de 110, 220, 340 et 440 V. Leurs vitesses nominales sont de 750, 1000, 1500, 200 et 3000 tr/min.
Chacune des 11 dimensions des machines de série 2P a deux longueurs de lit (M et L).
Série de machines électriques 4P avoir de meilleures techniques - indicateurs économiques par rapport à la série 2P... intensité de travail de la production d'une série 4P comparé à 2P réduit de 2,5 ... 3 fois. Dans le même temps, la consommation de cuivre est réduite de 25 ... 30%. Pour un certain nombre de caractéristiques de conception, y compris la méthode de refroidissement, la protection contre les intempéries, l'utilisation de pièces individuelles et d'assemblages de la machine de série 4P unifié avec moteurs asynchrones séries 4A et IA .
Les machines à courant continu (à la fois les générateurs et les moteurs) sont désignées comme suit :
PH1X2XZX4,
où 2P- Série de machines à courant continu ;
XI- exécution selon le type de protection : H - protégé avec auto-ventilation, F - protégé avec ventilation indépendante, B - fermé avec refroidissement naturel, O - fermé avec soufflage d'un ventilateur extérieur ;
X2- la hauteur de l'axe de rotation (numéro à deux ou trois chiffres) en mm ;
Hz- longueur conditionnelle du stator : M - premier, L - deuxième, G - avec génératrice tachymétrique ;
Un exemple est la désignation du moteur 2PN112MGU- Série de moteurs à courant continu 2P, conception protégée avec auto-ventilation N,112 hauteur de l'axe de rotation en mm, la première dimension du stator M, équipé d'une génératrice tachymétrique g, utilisé pour les climats tempérés Ont.
Par capacité, les machines électriques à courant continu peuvent être subdivisées de manière conditionnelle dans les groupes suivants :
Micromachines ……………………… ... moins de 100 W,
Petites machines ……………………… de 100 à 1000 W,
Machines de faible puissance ………… ..de 1 à 10 kW,
Machines de moyenne puissance ……… ..de 10 à 100 kW,
Grandes machines …………………… ..de 100 à 1000 kW,
Machines de grande puissance ……… Plus de 1000 kW.
Par tensions nominales les machines électriques se subdivisent classiquement comme suit :
Basse tension …………….. Moins de 100 V,
Moyenne tension ………… De 100 à 1000 V,
Haute tension …………… au-dessus de 1000V.
En termes de fréquence de rotation, les machines à courant continu peuvent être représentées comme :
Vitesse lente …………….. Moins de 250 tr/min.,
Vitesse moyenne ……… de 250 à 1000 tr/min.,
Grande vitesse ………… De 1000 à 3000 tr/min.
Ultra-rapide… ..plus de 3000 tr/min.
La tâche et la méthode d'exécution du travail.
1. Étudier le dispositif et le but des pièces individuelles des machines électriques à courant continu.
2. Déterminer les conclusions de la machine à courant continu relatives à l'enroulement d'induit et à l'enroulement de champ.
Les conclusions correspondant à un enroulement particulier peuvent être déterminées avec un mégohmmètre, un ohmmètre ou à l'aide d'une ampoule électrique. Lors de l'utilisation d'un mégohmmètre, une extrémité de celui-ci est connectée à l'une des bornes des enroulements et les autres extrémités touchent alternativement le reste. Une résistance mesurée de zéro indiquera que les deux bornes du même enroulement correspondent.
3. Reconnaître l'enroulement d'induit et l'enroulement d'excitation par les conclusions. Déterminer le type d'enroulement d'excitation (excitation parallèle ou série).
Cette expérience peut être réalisée à l'aide d'une ampoule connectée en série avec les enroulements. Pression constante doit être alimenté en douceur, en l'augmentant progressivement jusqu'à la valeur nominale spécifiée dans le passeport de la machine.
Compte tenu de la faible résistance de l'enroulement d'induit et de l'enroulement d'excitation en série, l'ampoule s'allumera vivement et leurs résistances mesurées avec un mégohmmètre (ou ohmmètre) seront pratiquement nulles.
Une ampoule connectée en série avec l'enroulement de champ parallèle sera faible. La valeur de résistance de l'enroulement de champ parallèle doit être dans la plage 0,3 ... 0,5 kOhm .
Les bornes de l'enroulement d'induit peuvent être reconnues en attachant une extrémité du mégohmmètre aux balais, tout en touchant l'autre extrémité aux bornes des enroulements sur le blindage machine électrique.
Les bornes des enroulements d'une machine électrique doivent être indiquées sur l'étiquette de borne conditionnelle figurant dans le rapport.
 Mesurer la résistance d'enroulement et la résistance d'isolement. La résistance des enroulements peut être mesurée à l'aide du circuit ampèremètre et voltmètre. La résistance d'isolement entre les bobinages et les bobinages par rapport au boîtier est vérifiée avec un mégohmmètre conçu pour une tension de 1 kV. La résistance d'isolement entre l'enroulement d'induit et l'enroulement d'excitation et entre eux et le boîtier doit être d'au moins 0,5 MOhm... Affichez les données mesurées dans le rapport.
Mesurer la résistance d'enroulement et la résistance d'isolement. La résistance des enroulements peut être mesurée à l'aide du circuit ampèremètre et voltmètre. La résistance d'isolement entre les bobinages et les bobinages par rapport au boîtier est vérifiée avec un mégohmmètre conçu pour une tension de 1 kV. La résistance d'isolement entre l'enroulement d'induit et l'enroulement d'excitation et entre eux et le boîtier doit être d'au moins 0,5 MOhm... Affichez les données mesurées dans le rapport.
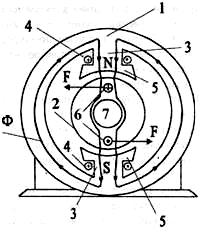
Dessinez conditionnellement en coupe les pôles principaux avec un enroulement d'excitation et une armature avec des spires d'enroulement situées sous les pôles (similaire à la figure 11.10). Pour prendre indépendamment la direction du courant dans les enroulements de champ et l'armature. Indiquer le sens de rotation du moteur dans ces conditions.
Riz. 11.10. Machine bipolaire à courant continu :
1 - lit; 2 - ancre; 3 - pôles principaux; 4 - enroulement d'excitation; 5 - pièces polaires; 6 - enroulement d'induit; 7 - collecteur; F est le flux magnétique principal ; F est la force agissant sur les conducteurs de l'enroulement d'induit.
Questions de contrôle et des devoirs pour l'auto-apprentissage
1 : Expliquer la conception et le fonctionnement du moteur et du générateur à courant continu.
2. Expliquez le but du collecteur de machines à courant continu.
3. Donner le concept de division des pôles et donner une expression pour sa définition.
4. Nommez les principaux types d'enroulements utilisés dans les machines à courant continu et sachez comment les réaliser.
5. Indiquer les principaux avantages des moteurs à excitation parallèle.
6. Que sont caractéristiques de conception enroulement parallèle versus enroulement série ?
7.Quelle est la particularité du démarrage des moteurs à courant continu à excitation série ?
8.Combien de branches parallèles ont une onde simple et un enroulement en boucle simple de machines à courant continu ?
9.Comment les machines à courant continu sont-elles étiquetées ? Donnez un exemple de désignation.
10. Quelle valeur la résistance d'isolement entre les enroulements des machines à courant continu et entre les enroulements et le châssis est-elle autorisée ?
11. Quelle valeur le courant peut-il atteindre au moment du démarrage du moteur en l'absence de résistance supplémentaire dans le circuit d'enroulement d'induit?
12. Quel est le courant de démarrage autorisé du moteur ?
13. Dans quels cas est-il permis de démarrer un moteur à courant continu sans résistance supplémentaire dans le circuit d'enroulement d'induit ?
14. Comment pouvez-vous changer l'EMF d'un générateur d'excitation indépendant ?
15. A quoi servent les pôles supplémentaires d'une machine à courant continu ?
16. Sous quelles charges est-il autorisé d'allumer le moteur à excitation séquentielle ?
17. Qu'est-ce qui détermine la valeur du flux magnétique principal ?
18. Écrivez les expressions pour la FEM du générateur et le couple du moteur. Donnez le concept de leurs constituants.
TRAVAUX DE LABORATOIRE 12.
Entrées associées :
 Мъжки noms juifs (noms juifs masculins)
Мъжки noms juifs (noms juifs masculins)
 "Ayhan" - la signification du nom, l'origine du nom, le jour du nom, le signe du zodiaque, les pierres de mascotte
"Ayhan" - la signification du nom, l'origine du nom, le jour du nom, le signe du zodiaque, les pierres de mascotte
 Un gland dans la maison qui apporte
Un gland dans la maison qui apporte
 La signification du nom Nurlan pour un garçon et un homme Que signifie le nom Nurlan
La signification du nom Nurlan pour un garçon et un homme Que signifie le nom Nurlan
 Caractéristiques du signe du zodiaque Balance
Caractéristiques du signe du zodiaque Balance





