Двигатель постоянного тока с независимым возбуждением принцип действия. Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Рисунок 1 — схема параллельного возбуждения машины постоянного тока
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
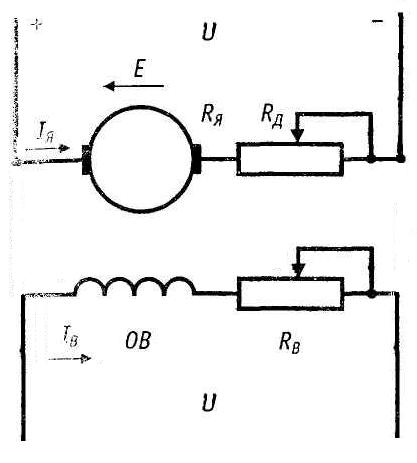
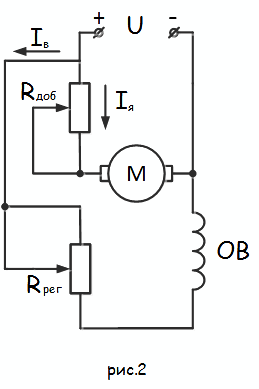
Рисунок 2 — схема независимого возбуждения машины постоянного тока
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
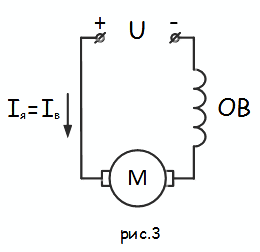
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
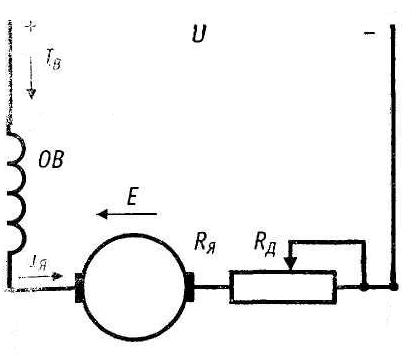
Рисунок 3 — схема последовательного возбуждения машины постоянного тока
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
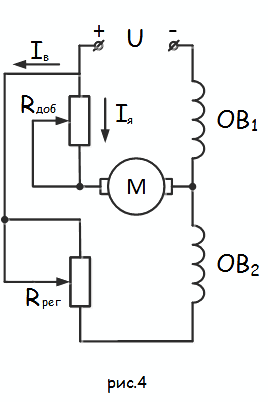
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
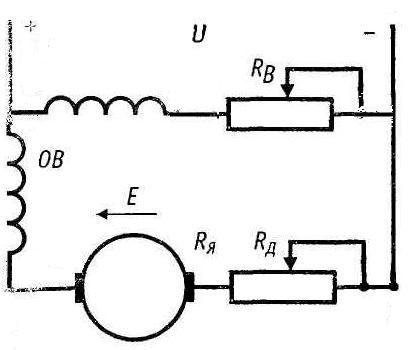
Рисунок 4 — схема смешанного возбуждения машины постоянного тока
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Министерство образования и науки Российской Федерации
ГОУ ВПО Южно-Уральский государственный университет
Филиал в г. Златоусте
Двигатели постоянного тока
ЗД-431.583.270102
Выполнил: Шарипова Ю.Р.
Группа: ЗД-431
Проверил: Румянцев.Е.
1. Введение
2. Устройство и принцип действия двигателей постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Кпд двигателей постоянного тока
6 Характеристики двигателя постоянного тока
6.1 Рабочие характеристики
6.2 Механическая характеристика
7. Список используемой литературы
1.Введение
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте, для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
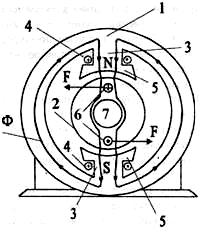
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.
Рис.1
На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода.Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:
![]() (1)
(1)
где КМ - коэффициент, зависящий от конструктивных параметров машины; Ф - магнитный поток одного полюса; IЯ - ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:
![]() (3)
(3)
где rЯ - сопротивление якоря.
Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда и ,
Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря
![]()
По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ. Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи, мощность Pн, частота вращения nн, ток Iн, КПД.
Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:
![]()
где Iян - ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают
Номинальная мощность Рн - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн.
Частота вращения nн, и КПД соответствуют работе двигателя с током Iн, напряжением Uн без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P2, момент М и частота вращения n связаны соотношением:
Потребляемая двигателем из сети мощность Р1, величины P2, КПД, U, I связаны соотношениями:
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.
5. КПД двигателей постоянного тока
Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть такова:
![]() (9)
(9)
где - потери в обмотке якоря; - потери в обмотке возбуждения; - потери в магнитопроводе якоря; - механические потери.
Потери мощности не зависят, и мало зависят от нагрузки двигателя.
Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений rя. Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8.
6.Характеристики двигателей постоянного тока
6.1. Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом случае регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
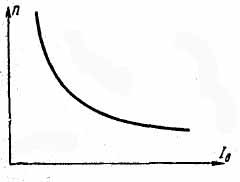
Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
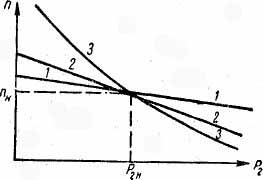
Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая - увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя
Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
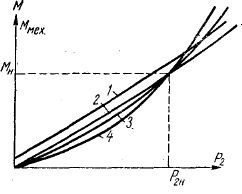
Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
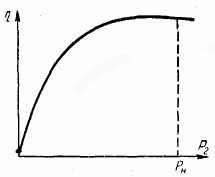
Рис. 5. Изменение к. п. д. двигателя
6.2 Механическая характеристика
Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(Iя):
![]() (7)
(7)
После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М):
![]() (8)
(8)
При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых.
При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя.
Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.6, характеристика 1).
Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами:
а) изменением сопротивления цепи якоря;
б) изменением магнитного потока двигателя;
в) изменением напряжения на зажимах якоря.
Рис. 6 Механические характеристики
Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд.
Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.2 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2.
Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения.
Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4.
Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.2(характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3.
Статическая характеристика двигателя. Получение естественной электромеханической характеристики. Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения.
Описание схемы системы Г – Д, ее структура и основные элементы, назначение. Расчет электромагнитных процессов импульсного регулятора тока возбуждения генератора. Вычисление среднего значения тока для заданных значений скважности импульсов управления.
Принцип работы и устройство генератора постоянного тока. Типы обмоток якоря. Способы возбуждения генераторов постоянного тока. Обратимость машин постоянного тока. Двигатель параллельного, независимого, последовательного и смешанного возбуждения.
Основные типы двигателей: двухтактные и четырехтактные. Конструкция двухтактного двигателя внутреннего сгорания. Принцип зажигания двигателя. История создания и принцип работы электродвигателя. Способы возбуждения электродвигателей постоянного тока.
Аналитический расчет коллекторного двигателя постоянного тока с возбуждением от феррит бариевых постоянных магнитов. Определение размеров двигателя. Подбор обмотки якоря. Расчет параметров коллекторов и щетки. Потери и коэффициент полезного действия.
Работа и устройство двигателя постоянного тока. Вращая генератор постоянного тока какой-нибудь внешней силой, мы затрачиваем определенную механическую мощность Pмех, а в сети получаем соответствующую злектрическую мощность Рэл.
Определение значений ряда характеристик вращения двигателя. Расчет величины токов переключения ступеней реостата. Графическое выражение электродинамических характеристик двигателя и значений скоростей вращения. Схема включения пусковых резисторов.
Свойства и характеристики синхронного генератора. Потеря энергии при преобразовании в синхронном генераторе механической энергии в электрическую. Устойчивость и увеличение перегрузочной способности генератора. Особенности параллельной работы генератора.
Все рабочие характеристики двигателя постоянного тока, как и генератора, зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным и, наконец, они могут быть независимы друг от друга.
Двигатели с параллельным возбуждением.
Здесь обмотка возбуждения и обмотка якоря соединены параллельно. Обмотка возбуждения имеет большее количество витков, чем обмотка якоря, поэтому ток обмотки возбуждения в большинстве случаев составляет несколько процентов от тока якоря. В цепь обмотки возбуждения может включаться регулировочный реостат. В цепь якоря включается пусковой реостат ПР.
Двигатель с независимым возбуждением.
Если обмотку возбуждения подключить к другому источнику постоянного напряжения, то получим двигатель с независимым возбуждением. Такими же свойствами обладают электродвигатели с постоянным магнитом.
Скоростная характеристика двигателей с независимым и параллельным возбуждением – это зависимость n
= f (Iя) при U = const и Iе = const, гдеn - скорость
Iя - ток якоря
Iе - ток возбуждения.
Рис.8.5.4. Скоростная характеристика.
Изменение скорости вращения может происходить за счёт изменения нагрузки и магнитного потока. Увеличение тока нагрузки незначительно изменяет внутреннее падение напряжения из-за малого сопротивления цепи якоря и поэтому лишь незначительно уменьшает скорость вращения двигателя. Что же касается магнитного потока, то вследствие реакции якоря при увеличении тока нагрузки он несколько уменьшается, что приводит к незначительному увеличению скорости двигателя. Таким образом, скорость вращения двигателя с параллельным возбуждением изменяется очень мало. Скорость вращения двигателя определяется формулой:
n = (U – IяRя) / c∙Φ, где
c – коэффициент, зависящий от устройства машины.
Скорость вращения двигателя с независимым возбуждением можно регулировать либо изменением сопротивления в цепи якоря, либо изменением магнитного потока. Следует отметить, что чрезмерное уменьшение тока возбуждения и, особенно, случайный обрыв этой цепи очень опасны для двигателей с параллельным и независимым возбуждением, т.к. ток в якоре может возрасти до недопустимо больших значений. При небольшой нагрузке (или на холостом ходу) скорость может настолько возрасти, что станет опасной для целостности двигателя.
Двигатель с последовательным возбуждением.
У такого двигателя ток якоря является одновременно и током возбуждения, т.к. обмотка возбуждения включена последовательно с якорем. По этой причине магнитный поток двигателя изменяется с изменением нагрузки. Скорость двигателя:
n =[ U – Iя (Rя + Rв)] / c∙Φ, где
Rя – сопротивление якоря
Rв – сопротивление обмотки возбуждения.
Скоростная характеристика двигателя посл. возбуждения.
На этом графике представлена скоростная характеристика двигателя последовательного возбуждения.
Из этой характеристики видно, что скорость двигателя сильно зависит от нагрузки. При увеличении нагрузки увеличивается падение на сопротивлении обмоток при одновременном увеличении магнитного потока, что приводит к значительному уменьшению скорости вращения. Поэтому такие двигатели не следует пускать вхолостую или с малой нагрузкой. Двигатели с последовательным возбуждением применяют в тех случаях, когда необходим большой пусковой момент или способность выдерживать кратковременные перегрузки. Они используются в качестве тяговых двигателей в трамваях, троллейбусах, метро и электровозах, а также на подъёмных кранах и для пуска двигателей внутреннего сгорания (стартеры).
Двигатель со смешанным возбуждением.
![]()
На каждом полюсе такого двигателя имеются две обмотки – параллельная и последовательная. Их можно включить так, чтобы магнитные потоки складывались (согласное включение) или вычитались (встречное включение). Формулы для скорости вращения и вращающего момента для такого двигателя:
n = (U – Iя ∙ Rя) / c∙(Φпарал. +/- Φпосл.)
М = c ∙ Iя ∙ (Φпарал. +/- Φпосл.)
В зависимости от соотношения магнитных потоков двигатель со смешанным возбуждением по своим свойствам приближается либо к двигателю с последовательным возбуждением, либо к двигателю с параллельным возбуждением. Как правило, у таких двигателей последовательная обмотка является главной (рабочей), а параллельная – вспомогательной. Благодаря наличию магнитного потока параллельной обмотки, скорость такого двигателя не может сильно возрастать на малых нагрузках. Двигатели с согласным включением применяются, когда необходим большой пусковой момент и регулировка скорости при переменных нагрузках. Двигатели со встречным включением обмоток применяются в тех случаях, когда необходима постоянная скорость при изменяющейся нагрузке.
Для изменения направления вращения двигателя постоянного тока надо изменить направление тока либо в обмотке возбуждения, либо в обмотке якоря . Изменением полярности на клеммах машины можно поменять направление вращения только в двигателе с постоянным магнитом или независимым возбуждением. В других двигателях надо изменить направление тока либо в якорной обмотке, либо в обмотке возбуждения. Двигатель постоянного тока нельзя включать подсоединением полного напряжения . Пусковой ток машин постоянного тока где-то в 20 раз превышает номинальный ток (он тем больше, чем больше и быстрее мотор). В больших машинах пусковой ток может превышать номинальный ток в 50 раз.
Большой ток вызывает в коллекторе круговое искрение и разрушает коллектор. Для включения применяют плавное увеличение напряжения или пусковые реостаты. Прямое включение допускается при низких напряжениях в случае маленьких двигателей, у которых сопротивление обмотки якоря большое.
Позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым , параллельным (шунтовым), последовательным (сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой - для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения включаются в соответствии со схемой, показанной на рис.11.9,б. Зажимы Я1 и Я2 относятся к обмотке якоря, а зажимы Ш1 иШ2 - к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд и Rв предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.
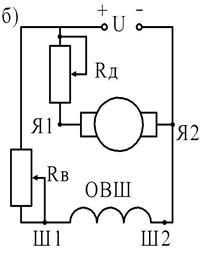
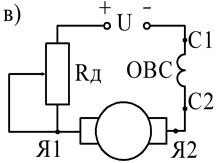
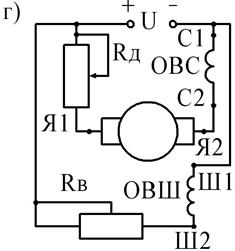
Рис.11.9. Виды возбуждения машин постоянного тока,
а - независимого возбуждения, б - параллельного возбуждения,
в - последовательного возбуждения, г - смешанного возбуждения.
ОВШ - обмотка возбуждения шунтовая, ОВС - обмотка возбуждения сериесная," ОВН - обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10...40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1 , а при специальном исполнении двигателя - 6:1 . Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины - при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения (сериесные) включаются по схеме, (рис.11.9, в). Выводы С1 и С2 соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря . Дополнительное сопротивление Rд в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5...2,5)Iн . После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения (компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд . Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П и 4П подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А . Машины серии2П имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико - экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5...3 раза. При этом расход меди снижается на 25...30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П - серия машины постоянного тока;
XI - исполнение по типу защиты: Н - защищенное с самовентиляцией, Ф - защищенное с независимой вентиляцией, Б - закрытое с естественным охлаждением, О - закрытое с обдувом от постороннего вентилятора;
Х2 - высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ - условная длина статора: М - первая, L - вторая, Г - с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ - двигатель постоянного тока серии 2П , защищенного исполнения с самовентиляцией Н ,112 высота оси вращения в мм, первый размер статораМ , укомплектован тахогенератором Г , используется для умеренного климатаУ .
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины ………………………...меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3...0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
 Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм
. Данные замеров отобразить в отчете.
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис.11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 - станина; 2 -якорь; 3 - главные полюсы; 4 - обмотка возбуждения; 5 - полюсные наконечники; 6 - обмотка якоря; 7 - коллектор; Ф - основной магнитный поток; F - сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7.В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18.Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
Похожие записи:
 Античная литература в переводах на русский и другие языки Платон о смысле любви диалог пир введение
Античная литература в переводах на русский и другие языки Платон о смысле любви диалог пир введение
 Федеральные новости Матем фипи егэ год работы
Федеральные новости Матем фипи егэ год работы
 Житие святой великомученицы ирины македонской Житие благоверной царицы Ирины Македонской
Житие святой великомученицы ирины македонской Житие благоверной царицы Ирины Македонской
 Псково-печерские старцы и духовное преемство
Псково-печерские старцы и духовное преемство
 Also, too и as well: что выбрать?
Also, too и as well: что выбрать?





