Двигатель постоянного тока независимого возбуждения принцип работы. Механические характеристики и способы регулирования скорости двигателей постоянного тока последовательного и смешанного возбуждения
Доброго времени суток, дорогие читатели! В этой статье я расскажу о том, что такое возбуждение в двигателях постоянного тока и «с чем его едят».
Наверное, каждый из нас в детстве имел игрушки с электроприводом. Те же, кто в те годы отличался любопытностью, не упустили возможность разобрать эти игрушки, дабы посмотреть, а что там внутри.
Заглянув внутрь такой игрушки, нами был найден маленький электромоторчик постоянного тока. Естественно, тогда мы и не задумывались над тем, почему он работает. Некоторые из нас, найдя в игрушке моторчик, решались разобрать и его. Вот эти-то любопытные товарищи, разобрав моторчик, находили там постоянный магнит (иногда не один), щетки и якорь с коллектором.
Так вот, как раз постоянный магнит и является простейшей системой возбуждения для моторов постоянного тока . Ведь якорь моторчика вращается только тогда, когда вокруг него присутствует постоянное магнитное поле, которое и создается при помощи постоянного магнита.
Двигатели постоянного тока промышленных масштабов, в качестве возбудителей, используют специальные обмотки, именуемые обмотками возбуждения.
Подключение же этих обмоток может быть самым различным. Они могут включаться параллельно якорю, последовательно с ним, смешано и, даже, независимо от них.
Кстати, моторчики, имеющие в качестве возбудителя постоянный магнит, считаются устройствами с независимым возбуждением.
Возбуждающая обмотка состоит из значительно большего числа витков, нежели якорная. В связи с этим, ток якорной обмотки в десятки раз превосходит ток возбуждающей. Скорость вращения такого движка может меняться в зависимости от нагрузки и магнитного потока. Благодаря свойствам подключения, движки параллельного включения довольно мало подвержены перемене частоты вращения.
Теперь рассмотрим вариант раздельного подключения рабочей и возбуждающей обмоток. Такой движок именуется мотором с независимым возбуждением. Скорость такого движка может регулироваться при помощи смены сопротивления якорной цепи или магнитного потока.
Тут есть небольшой нюансик: не стоит слишком уменьшать ток возбуждения при таком включении двигателя, поскольку это чревато очень большим подъемом якорного тока. Тем же самым опасен и обрыв цепи возбуждения этих двигателей. Кроме того, если нагрузка мотора с таким включением мала, либо при его включении на холостой ход может произойти такой сильный его разгон, что возникнет опасность для движка.
Как я уже говорил, разновидностью ДПТ независимого возбуждения считаются устройства, имеющие в качестве возбудителя постоянные магниты. Скажу несколько слов и о них.
Поскольку ДПТ и машины синхронного типа могут использовать вместо возбудителей постоянные магниты, то подобный вариант считается достаточно привлекательным. И вот почему:
- у такого устройства снижено потребления тока за счет уменьшения числа обмоток, в результате чего такие показатели подобных машин, как КПД, оказываются выше;
- с использованием вместо возбудителя постоянных магнитов упрощается конструкция возбуждающих цепей движка, что повышает его надежность, ведь постоянный магнит не требует питания, следовательно, у такого мотора нет токосъемного узла на роторе.
Теперь о последовательном включении обмоток (двигатели с последовательным возбуждением).
В этом варианте подключения, якорный ток будет являться и возбуждающим. Это становится причиной изменения магнитного потока в сильной зависимости от нагрузки. Это является причиной большой нежелательности пуска их на холостом ходу и при маленькой нагрузке.
Применение же такое включение нашло там, где требуется значительный момент пуска, либо возможность выдерживания кратковременных перегрузок. В связи с этим, их применяют, как средства тяги для трамваев, троллейбусов, электровозов, метро и подъемных кранов. Кроме того, их применяют, как средство запуска для ДВС (в качестве стартеров).
Последним вариантом включения движков постоянного тока считается их смешанное включение. Каждый из полюсов этих моторов оснащен парой обмоток, одна из которых параллельная, а другая – последовательная. Подключать их возможно двумя способами:
- согласный метод (в этом случае токи складываются);
- встречный вариант (вычитание токов).
Соответственно, в зависимости от варианта подключения (от чего меняется и соотношение магнитных потоков), такой мотор может оказаться приближен либо к устройству, имеющему последовательное возбуждение, либо к движку с параллельным возбудом.
В большинстве случаев, основной обмоткой у них считают последовательную обмотку, а параллельную – вспомогательной. За счет параллельной обмотки у таких моторов скорость при небольших нагрузках практически не растет.
Если требуется получение значительного момента при пуске и возможность регулирования скорости на переменных нагрузках, используется подключение согласного типа. Встречное же подключение используется при необходимости получения постоянной скорости при изменяющейся нагрузке.
Если возникает необходимость реверсирования ДПТ (смены направления его вращения), то меняют направление тока в одной из его рабочих обмоток.
Методом смены полярности подключения клемм двигателя возможно поменять направление только тех моторов, которые включены по независимой схеме, либо движков с постоянным магнитом в качестве возбудителя. Во всех иных устройствах необходима смена направления тока в одной из рабочих обмоток.
Кроме того, движки постоянного тока нельзя включать методом подключения полного напряжения. Это связано с тем, что величина их пускового тока примерно в 2 десятка раз выше номинального (это зависит от размеров и скорости двигателя). Токи пуска движков больших размеров могут и в полсотни раз превосходить их номинальный рабочий ток.
Токи больших величин способны вызвать эффект кругового искрения коллектора, в результате чего коллектор разрушается.
Чтобы выполнить включение ДПТ, используется методика , либо применение пусковых реостатов. Включение прямого типа возможно лишь на небольших напряжениях и для маленьких движков, имеющих большое сопротивление якорной обмотки.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Первой из всех изобретенных в 19 веке вращающихся электромашин является двигатель постоянного тока. Принцип действия его известен с середины прошлого столетия, и до настоящего времени двигатели постоянного тока (ДПТ) продолжают верно служить человеку, приводя в движение множество полезных машин и механизмов.
Первые ДПТ
Начиная с 30-х годов 19 века в своем развитии они прошли несколько этапов. Дело в том, что до появления в конце позапрошлого века машинных единственным источником электроэнергии был гальванический элемент. Поэтому все первые электродвигатели могли работать только на постоянном токе.
Каким же был первый двигатель постоянного тока? Принцип действия и устройство двигателей, строившихся в первой половине 19 века, являлся следующим. Явнополюсный индуктор представлял собой набор неподвижных постоянных магнитов или стержневых электромагнитов, не имевших общего замкнутого магнитопровода. Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.
Как работал двигатель Якоби
Каков же был у этой машины принцип действия? Двигатель постоянного тока Якоби и его аналоги обладали пульсирующим электромагнитным моментом. В течение времени сближения разноименных полюсов якоря и индуктора под действием магнитной силы притяжения момент двигателя быстро достигал максимума. Затем, при расположении полюсов якоря напротив полюсов индуктора, механический коммутатор прерывал ток в электромагнитах якоря. Момент падал до нуля. За счет инерции якоря и приводимого в движение механизма полюсы якоря выходили из-под полюсов индуктора, в этот момент в них от коммутатора подавался ток противоположного направления, их полярность также менялась на противоположную, а сила притяжения к ближайшему полюсу индуктора сменялась на силу отталкивания. Таким образом, двигатель Якоби вращался последовательными толчками.
Появляется кольцевой якорь
В стержневых электромагнитах якоря двигателя Якоби ток периодически выключался, создаваемое ими магнитное поле исчезало, а его энергия преобразовывалась в тепловые потери в обмотках. Таким образом, электромеханическое преобразование электроэнергии источника тока якоря (гальванического элемента) в механическую происходило в нем с перерывами. Нужен был двигатель с непрерывной замкнутой обмоткой, ток в которой протекал бы постоянно в течение всего времени его работы.
И такой fuhtufn был создан в 1860 году А. Пачинотти. Чем же отличался от предшественников его двигатель постоянного тока? Принцип действия и устройство двигателя Пачинотти следующие. В качестве якоря он использовал стальное кольцо со спицами, закрепленное на вертикальном валу. При этом якорь не имел явно выраженных полюсов. Он стал неявнополюсным.
Между спицами кольца были намотаны катушки обмотки якоря, концы которых соединялись последовательно на самом якоре, а от точек соединения каждых двух катушек были сделаны отпайки, присоединенные к пластинам коллектора, расположенным вдоль окружности внизу вала двигателя, число которых равнялось числу катушек. Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Кольцевой якорь был помещен между полюсами двух неподвижных электромагнитов индуктора-статора, так что силовые линии создаваемого ими магнитного поля возбуждения входили в наружную цилиндрическую поверхность якоря двигателя под северным полюсом возбуждения, проходили по кольцевому якорю, не перемещаясь во внутреннее его отверстие, и выходили наружу под южным полюсом.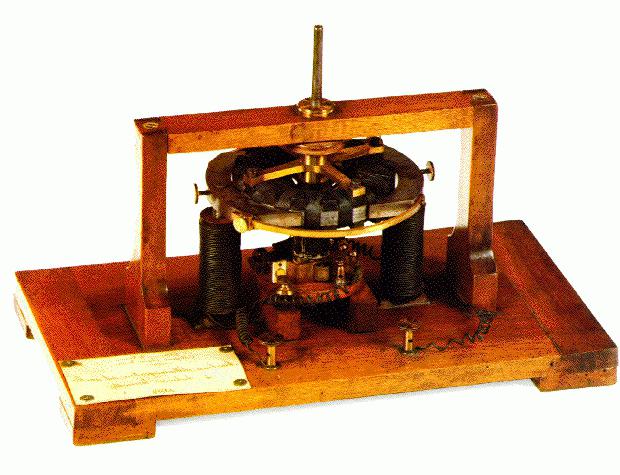
Как работал двигатель Пачинотти
Какой же у него был принцип действия? Двигатель постоянного тока Пачинотти работал точно так же, как и современные ДПТ.
В магнитном поле полюса индуктора с данной полярностью всегда находилось определенное число проводников обмотки якоря с током неизменного направления, причем направление тока якоря под разными полюсами индуктора было противоположным. Это достигалось размещением токоподводящих роликов, играющих роль щеток, в пространстве между полюсами индуктора. Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но в них оставалось неизменным.
По на каждый проводник катушки якоря с током, находящийся в магнитном поле полюса индуктора, действовала сила, направление которой определяется по известному правилу «левой руки». Относительно оси двигателя эта сила создавала вращающий момент, а сумма моментов от всех таких сил дает суммарный момент ДПТ, который уже при нескольких пластинах коллектора является почти постоянным.
ДПТ с кольцевым якорем и граммовской обмоткой
Как это часто случалось в истории науки и техники, изобретение А. Пачинотти не нашло применения. Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Несмотря на то, что изобретение кольцевого якоря было важным шагом в развитии ДПТ, его обмотка (названная граммовской) имела существенный недостаток. В магнитном поле полюсов индуктора находились только те ее проводники (называемые активными), которые лежали под этими полюсами на наружной цилиндрической поверхности якоря. Именно к ним были приложены магнитные создающие вращающий момент относительно оси двигателя. Те же неактивные проводники, что проходили через отверстие кольцевого якоря, не участвовали в создании момента. Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.
От кольцевого якоря к барабанному
Устранить этот недостаток кольцевого якоря удалось в 1873 году известному немецкому электротехнику Ф. Гефнер-Альтенеку. Как же функционировал его двигатель постоянного тока? Принцип действия, устройство его индуктора-статора такие же, как у двигателя с кольцевой обмоткой. А вот конструкция якоря и его обмотка изменились.
Гефнер-Альтенек обратил внимание, что направление тока якоря, вытекающего из неподвижных щеток, в проводниках граммовской обмотки под соседними полюсами возбуждения всегда противоположно, т.е. их можно включить в состав витков расположенной на наружной цилиндрической поверхности катушки с шириной (шагом), равным полюсному делению (части окружности якоря, приходящейся на один полюс возбуждения).
В этом случае становится ненужным отверстие в кольцевом якоря, и он превращается в сплошной цилиндр (барабан). Такая обмотка и сам якорь получили наименование барабанных. Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.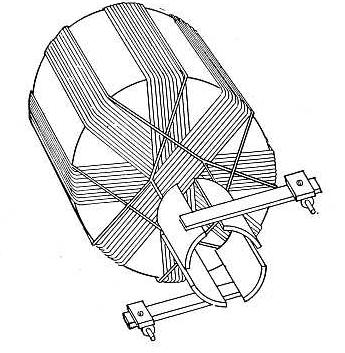
Якорь становится зубчатым
В машинах Грамма и Гефнер-Альтенека поверхность якоря была гладкой, а проводники его обмотки располагались в зазоре между ним и полюсами индуктора. При этом расстояние между вогнутой цилиндрической поверхностью полюса возбуждения и выпуклой поверхностью якоря достигало нескольких миллиметров. Поэтому для создания нужной величины магнитного поля требовалось применять катушки возбуждения с большой магнитодвижущей силой (с большим числом витков). Это существенно увеличивало габариты и вес двигателей. Кроме того, на гладкой поверхности якоря его катушки было трудно крепить. Но как же быть? Ведь для действия на проводник с током силы Ампера он должен находиться в точках пространства с большой величиной магнитного поля (с большой магнитной индукцией).
Оказалось, что это не является необходимым. Американский изобретатель пулемета Х. Максим показал, что если выполнить барабанный якорь зубчатым, а в образовавшиеся между зубцами пазы поместить катушки барабанной обмотки, то зазор между ним и полюсами возбуждения можно уменьшить до долей миллиметра. Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Как же функционирует такой двигатель постоянного тока? Принцип действия основан на том обстоятельстве, что при зубчатом якоре магнитная сила приложена не к проводникам в его пазах (магнитное поле в них практически отсутствует), а к самим зубцам. При этом наличие тока в проводнике в пазу имеет решающее значение для возникновения этой силы.
Как избавились от вихревых токов
Еще одно важнейшее усовершенствование внес знаменитый изобретатель Т. Эдиссон. Что же добавил он в двигатель постоянного тока? Принцип действия остался неизменным, а вот материал, из которого сделан его якорь, изменился. Вместо прежнего массивного он стал шихтованным из тонких электрически изолированных друг от друга стальных листов. Это позволило уменьшить величину вихревых токов (токов Фуко) в якоре, что увеличило КПД двигателя.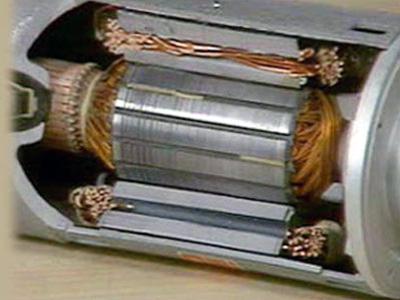
Принцип действия двигателя постоянного тока
Кратко его можно сформулировать так: при подключении обмотки якоря возбужденного двигателя к источнику питания в ней возникает большой ток, называемый пусковым и превышающий в несколько раз его номинальное значение. Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.
Чтобы повысить скорость вращения якоря, нужно либо увеличить ток в его обмотке, либо снизить противо-ЭДС в ней. Последнего можно добиться, уменьшив величину магнитного поля возбуждения путем снижения тока в обмотке возбуждения. Данный способ управления скоростью ДПТ получил широкое распространение.
Принцип действия двигателя постоянного тока с независимым возбуждением
С присоединением выводов обмотки возбуждения (ОВ) к отдельному источнику электропитания (независимая ОВ) обычно выполняются мощные ДПТ, чтобы было более удобно регулировать величину тока возбуждения (с целью изменения скорости вращения). По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
Параллельное возбуждение ДПТ
Принцип действия двигателя постоянного тока параллельного возбуждения определяется его механической характеристикой, т.е. зависимостью скорости вращения от нагрузочного момента на его валу. Для такого двигателя изменение скорости при переходе от холостого вращения к номинальному моменту нагрузки составляет от 2 до 10%. Такие механические характеристики называются жесткими.
Таким образом, принцип действия двигателя постоянного тока с параллельным возбуждением обуславливает его применение в приводах с постоянной скоростью вращения при большом диапазоне изменения нагрузки. Однако он широко используется и в регулируемом электроприводе с переменной скоростью вращения. При этом для регулирования его скорости может применяться изменение как тока якоря, так и тока возбуждения.
Последовательное возбуждение ДПТ
Принцип действия двигателя постоянного тока последовательного возбуждения, как и параллельного, определяется его механической характеристикой, которая в этом случае является мягкой, т.к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
Принцип действия двигателя постоянного тока с последовательным возбуждением реализуют также тяговые двигатели пульсирующего тока, которые представляют собой, по сути, те же ДПТ с последовательной ОВ, но специально сконструированные для работы с выпрямленным уже на борту электровоза током, имеющим значительные пульсации.
Лекция №2
Терминология + все о двигателе постоянного тока независимого возбуждения
Автоматизированный электропривод – электрический привод, в котором регулирование режимов работы осуществляется при помощи устройств автоматического управления в соответствии с требованиями производственного процесса. Для управления АЭ применяют полупроводниковые силовые преобразователи, бесконтактные системы управления, микропроцессоры, программируемые контроллеры и др. средства автоматизации. Существующие типы автоматизированного электропривода выполняют самые разнообразные функции – от сравнительно простых (автоматический пуск, останов, реверсирование механизма, поддержание или изменение с высокой точностью его скорости и т.п.) до управления сложными установками с комплексной автоматизацией технологических процессов. К важнейшим разновидностям автоматизированного электропривода относятся следящие электроприводы, позиционные, программно-управляемые и др. Следящий электропривод – электропривод, имеющий систему автоматического регулирования, которая обеспечивает перемещение исполнительного органа рабочей машины в соответствии с перемещением контролируемого объекта. Следящий электропривод содержит задающее устройство, датчик положения, устройства сравнения, усилители и сервомотор. Применяются в системах автоматического управления, передачи информации и измерения. В процессе обработки на станках с ЧПУ необходимы определенные и точные движения инструмента и заготовки, поэтому мы управляем и координатами режущей кромки и скоростью резания. Движения выполняются с помощью различных двигателей, моторов. Привод – это двигатель, управляющий преобразователь + механическая передача к рабочему органу, например к шпинделю токарного станка, фрезе или шлифовальному кругу. Кроме главного привода в станках есть дополнительные, вспомогательные приводы подач по другим координатам, приводы зажимного устройства, приводы автоматического переключения муфт сцепления и др. Главный привод совершает основную работу в производственном цикле. Вспомогательные приводы включаются периодически. На современных станках несколько приводных двигателей. В роботах на каждую степень свободы – свой двигатель. Чем крупнее деталь, которую надо сделать, тем больше размеры станков и мощнее их приводы. Когда движения по разным степеням свободы связаны кратными отношениями их синхронизируют механическими передачами. Например, вращение ω и продольную подачу Z в токарном станке проще выполнить с помощью одного двигателя. При нарезании резьбы выбирают такое передаточное отношение, чтобы смещение Z на шаг резьбы происходило за один оборот шпинделя. Как траектория движения x (t ), y (t ), z (t ) , так и соответствующие им скорости движения рабочего органа dx / dt , dy / dt , dz / dt могут быть достаточно сложными. Точность, с которой станок без ошибок выполняет свои функции, закладывается конструктором, который проектирует станок. Они должны знать и понимать эти причины. Станок проектируется под определенные габариты и массу деталей. Чем крупнее детали, тем более жесткий и массивный должен быть функциональный скелет станка. В каждой операции на станке существует оптимальная скорость резания. Для грубой обдирки заготовки по диаметру D скорость резания υ=ω· D /2 выбирается небольшой, но с увеличенной подачей. Для чистового же точения или шлифовки окружные скорости υ=ω· D /2 назначают в несколько десятков метров в секунду. Соответственно в приводе обеспечивается изменение скоростей вращения шпинделя от ω min до ω max . Характеризуя станок, говорят о диапазоне регулирования, т.е. об отношении ω max /ω min . Переход с одной скорости ω 1 на другую ω 2 , ω 3 , и др. выполняется механическим переключением шестерен редуктора, электромеханическим переключением шестерен редуктора или плавным бесступенчатым регулированием посредством электродвигателей. Вероятно, непрерывный переход с одной скорости на другую предпочтительнее, чем ступенчатое переключение с остановками. Резкий старт и резкий останов – это ударные нагрузки на трансмиссию и скелет станка. Резкие удары сокращают срок жизни машины.Механика электропривода
Рис.0 Структурная схема электропривода
Электропривод представляет собой единую электромеханическую систему, структурная схема которой имеет вид (рис. 0): ЭСУ - энергетическая часть системы управления; ИСУ - информационная часть системы управления; ЭМП – электромеханический преобразователь; РД – ротор двигателя; ПМ – передаточный механизм; ИМ - исполнительный механизм. Потребляемая из сети электрическая энергия электромеханическим преобразователем (ЭМП) преобразуется в механическую энергию. Механическая энергия передаётся ротору двигателя (РД), где частично расходуется на увеличение запаса кинетической энергии и на механические потери двигателя. Оставшаяся часть механической энергии с вала двигателя через передаточный механизм ПМ поступает в исполнительный механизм ИМ и далее к его рабочему органу. В современном электроприводе ЭСУ представляет собой управляемый преобразователь электрической энергии того или иного вида, обеспечивающий преобразование тока, напряжения и частоты, необходимое для работы электропривода. Информационная система управления (ИСУ) управляет процессом преобразования энергии (электрической в механическую и наоборот) на основе информации о заданных режимах работы, о текущем состоянии системы и о протекании технологического процесса. К ротору двигателя при скорости ω приложен электромагнитный момент М , под действием которого механическая часть приводится в движение и в рабочем органе машины совершается предусмотренная технологическим процессом работа.
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Электромеханическое преобразование электрической энергии
в механическую
Электрическая машина постоянного тока (МПТ) имеет специфическую конструкцию. Схематически она показана на рис.1. Неподвижная часть (статор) содержит главные полюса с катушками, образующие индуктор или систему возбуждения машины. Полюса равномерно распределены на внутренней поверхности станины, которая совмещает функции механической детали (корпуса) и активной части (ярма магнитопровода статора). Поскольку через станину (ярмо) проходит постоянный магнитный поток, не индуктирующий в ней вихревых токов, то она выполняется монолитной стальной. Что же касается сердечников главных полюсов, то они чаще всего выполняются шихтованными: состоят из отдельных пластин, стянутых заклепками, шпильками или др. Необходимо знать, что такое решение диктуется скорее удобством изготовления полюса, чем стремлением ограничить вихревые токи. Для обеспечения безыскровой коммутации в машине предусмотрены добавочные полюса, обмотки которых включаются последовательно в цепь якоря. Ротор МПТ чаще называют якорем. Он несет главную обмотку машины, по которой течет её основной ток. Якорная обмотка располагается в пазах магнитопровода. Выводы обмотки соединены с пластинами коллектора. Магнитопровод и коллектор размещены на общем валу. Важно знать, что пазы магнитопровода должны быть строго сориентированы относительно пластин коллектора. Это является обязательным условием нормальной работоспособности МПТ. К этому следует также добавить, что в не меньшей степени эта задача решается и последовательностью соединения выводов якорной обмотки с пластинами коллектора. Жесткое взаимное ориентирование пластин коллектора относительно пазов сердечника обеспечивается использованием шпоночных соединений этих узлов с валом и строгим соблюдением схемы распайки выводов обмотки на коллекторных пластинах. К внешней (активной) поверхности коллектора прижимаются токосъемные щетки. Они могут быть угольными, графитовыми, композитными и д.р. Одна группа может содержать одну или несколько щеток, в зависимости от пропускаемого через контакт тока. Уменьшение числа щеток в группе всегда приведет к ухудшению параметров МПТ. Важное значение имеет площадь контакта (прилегание – 100%) и сила нажатия щетки к коллектору. Следует помнить, что со временем щетки изнашиваются и сила их нажатия на коллектор ослабевает.
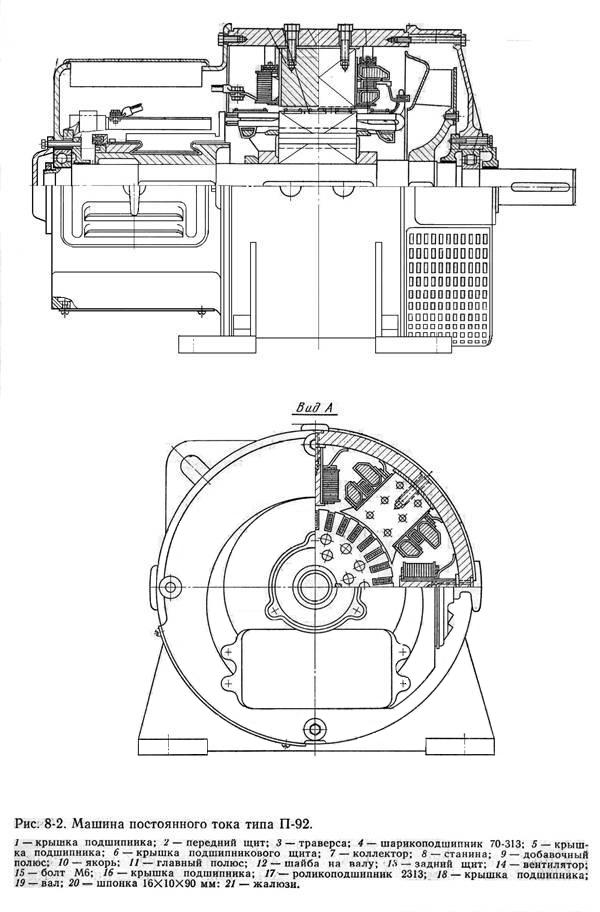
Рис.1. Машина постоянного тока типа П-92
Щетки МПТ устанавливаются в щеткодержатели, которые ориентируют и прижимают щетку. Сами же щеткодержатели размещают на специальных пальцах траверсы, смонтированной на внутренней стороне подшипникового щита. Траверса имеет возможность поворота вокруг оси машины и фиксации её в любом выбранном положении. Это позволяет при необходимости регулировать положение щеток на коллекторе из условия минимального искрения в щеточном контакте. Машины постоянного тока (МПТ) чаще используются в качестве двигателей, они обладают высоким пусковым моментом, возможностью широко регулировать скорость, легко реверсируются, имеют практически линейные регулировочные характеристики, экономичны. Эти достоинства МПТ часто ставят их вне конкуренции в приводах, требующих широких и точных регулировок. Важным преимуществом МПТ является также возможность их регулирования по слаботочным цепям возбуждения. Тем не менее, используют эти машины только там, где невозможно подобрать равноценную замену. Связано это с наличием щеточно-коллекторного узла. Именно он обуславливает большинство недостатков МПТ: повышает её стоимость, сокращает ресурс, создает радиопомехи, акустический шум. Искрение под щетками повышает требования к окружающей среде, ускоряет износ щеток и пластин коллектора. Продукты износа покрывают внутреннюю полость машины тонким проводящим слоем, ухудшая изоляцию токопроводящих цепей. И это далеко не полный перечень проблем, связанных с щеточно-коллекторным узлом МПТ.

Рис. 1.1. Схемы возбуждения машин постоянного тока
Возбуждение - это понятие, связанное с созданием основного магнитного поля машины. В машинах с электромагнитным возбуждением основное поле создается обмотками возбуждения. Имеются конструкции, в которых возбуждение создается постоянными магнитами, размещенными на статоре. Различают четыре схемы включения статорных обмоток: с независимым, параллельным, последовательным и смешанным возбуждением (рис. 1.1.). Изображения под пунктами б, в, г на рис. 1.1, называются схемами с самовозбуждением. Процесс самовозбуждения происходит за счет остаточной намагниченности полюсов и станины. При вращении якоря в этом, небольшом по величине, магнитном поле (Ф ОСТ = 0,02 0,03 Ф О) индуцируется ЭДС - Е ОСТ. Поскольку обмотка возбуждения подключена через щетки к якорю, то в ней будет протекать ток. Этот ток усилит магнитное поде полюсов и приведет к увеличению ЭДС якоря. Большая ЭДС вновь увеличит ток возбуждения и произойдет нарастание магнитного потока до полного намагничивания машины. Работа электродвигателя и генератора постоянного тока характеризуется следующими основными величинами:
- М – электромагнитный момент, развиваемый электродвигателем, Н·м; М c – момент сопротивления (нагрузка, статический момент), создаваемый производственным механизмом, Н·м; I я – ток якоря электродвигателя, А; U – напряжение, приложенное к якорной цепи, В; Е – электродвижущая сила (э.д.с.) машины постоянного тока (для электродвигателя ее называют противо -э.д.с, так как в электродвигателе она направлена навстречу напряжению U и препятствует протеканию тока), В; Ф – магнитный поток, создаваемый в электродвигателе при протекании тока по обмотке возбуждения, Вб; R я – сопротивление цепи якоря, Ом; ω – угловая скорость (частота) вращения якоря электродвигателя, с -1 (вместо ω часто употребляется величина n, об/мин),
 .
.
Взаимосвязь этих величин отражена в следующих четырех формулах:
 , (1.1)
, (1.1)
E = K*Ф*ω , (1.2)
 , (1.3)
, (1.3)
М = К*Ф*I я, (1.4)
где J – момент инерции системы электропривода, кг*м 2 ; dω/dt – угловое ускорение вала электродвигателя, c -1 ; К – конструктивная постоянная электродвигателя. - конструктивная постоянная двигателя,
- конструктивная постоянная двигателя,  - число пар полюсов;
- число пар полюсов;  - число активных стержней;
- число активных стержней;  - число пар параллельных ветвей (количество обмоток в секции);. Формула (1.1) является видоизмененной записью основного уравнения движения электропривода
- число пар параллельных ветвей (количество обмоток в секции);. Формула (1.1) является видоизмененной записью основного уравнения движения электропривода  . Нетрудно видеть, что основное уравнение движения является аналогом закона Ньютона a = F/m. Разница лишь в том, что для вращательного движения линейное ускорение а
заменяется угловым ускорением dω/dt, масса m – моментом инерции J, а сила F заменяется динамическим моментом М дин, равным разности момента электродвигателя М и статического момента М с. Формула (1.2) отражает принцип действия генератора постоянного тока, основанный на законе электромагнитной индукции. Для того, чтобы появилась ЭДС, достаточно вращать якорь с некоторой скоростью ω в магнитном потоке Ф. ЭДС Е в машине получить невозможно, если отсутствует хотя бы одна из величин: ω (электродвигатель не вращается) или Ф (машина не возбуждена). Формула (1.3) показывает, что ток I я в якорной цепи протекает в двигателе под действием приложенного к якорю напряжения U. Величина этого тока ограничивается вырабатываемой при вращении электродвигателя противо-э.д.с. Е и сопротивлением якорной цепи. Формула (1.4) фактически иллюстрирует принцип действия электродвигателя постоянного тока (создание вращающего момента), основанный на законе взаимодействия тока в проводнике и магнитного поля. Для этого нужно создать магнитный поток Ф и пропустить ток I я по обмотке якоря. Момент всегда будет, если есть поток Ф и ток якоря I я. Формулы (1.1) - (1.4) описывают все основные процессы в электродвигателе постоянного тока. 1.2. Механические и электромеханические характеристики электрических машин постоянного тока в двигательном режиме 1.2.1. Естественные электромеханические и механические характеристики ДПТ с независимым (параллельным) возбуждением Для вывода электромеханической ω = f 1 (I я) и механической характеристик ω = f 2 (M) двигателя постоянного тока с независимым (параллельным) возбуждением рассмотрим простейшую схему включения двигателя (рис.2). К якорю электродвигателя прикладывается напряжение сети постоянного тока U c = U, которое в установившемся режиме уравновешивается ЭДС Е двигателя и падением напряжения в цепи якоря (I я ∙R яц).
. Нетрудно видеть, что основное уравнение движения является аналогом закона Ньютона a = F/m. Разница лишь в том, что для вращательного движения линейное ускорение а
заменяется угловым ускорением dω/dt, масса m – моментом инерции J, а сила F заменяется динамическим моментом М дин, равным разности момента электродвигателя М и статического момента М с. Формула (1.2) отражает принцип действия генератора постоянного тока, основанный на законе электромагнитной индукции. Для того, чтобы появилась ЭДС, достаточно вращать якорь с некоторой скоростью ω в магнитном потоке Ф. ЭДС Е в машине получить невозможно, если отсутствует хотя бы одна из величин: ω (электродвигатель не вращается) или Ф (машина не возбуждена). Формула (1.3) показывает, что ток I я в якорной цепи протекает в двигателе под действием приложенного к якорю напряжения U. Величина этого тока ограничивается вырабатываемой при вращении электродвигателя противо-э.д.с. Е и сопротивлением якорной цепи. Формула (1.4) фактически иллюстрирует принцип действия электродвигателя постоянного тока (создание вращающего момента), основанный на законе взаимодействия тока в проводнике и магнитного поля. Для этого нужно создать магнитный поток Ф и пропустить ток I я по обмотке якоря. Момент всегда будет, если есть поток Ф и ток якоря I я. Формулы (1.1) - (1.4) описывают все основные процессы в электродвигателе постоянного тока. 1.2. Механические и электромеханические характеристики электрических машин постоянного тока в двигательном режиме 1.2.1. Естественные электромеханические и механические характеристики ДПТ с независимым (параллельным) возбуждением Для вывода электромеханической ω = f 1 (I я) и механической характеристик ω = f 2 (M) двигателя постоянного тока с независимым (параллельным) возбуждением рассмотрим простейшую схему включения двигателя (рис.2). К якорю электродвигателя прикладывается напряжение сети постоянного тока U c = U, которое в установившемся режиме уравновешивается ЭДС Е двигателя и падением напряжения в цепи якоря (I я ∙R яц).

Рис.2. Схема электрическая принципиальная двигателя постоянного
тока независимого возбуждения
U c = Е + I я ∙R яц, (1.5)
где R яц = R я +R ДЯ +R дп +R ко,- сопротивление цепи якоря, Ом; R я – сопротивление обмотки якоря, Ом; R ДЯ – добавочное сопротивление в цепи якоря, Ом; R дп,R ко – соответственно, сопротивления обмоток дополнительных полюсов и компенсационной обмотки, Ом. Подставив в уравнение (1.5) значение Е согласно (1.2) и произведя соответствующие преобразования относительно частоты вращения ω, получим электромеханическую характеристику электродвигателя постоянного тока независимого (параллельного) возбуждения
 . (1.6)
. (1.6)
Выразив величину тока якоря через электромагнитный момент (1.4) и подставив значение тока в уравнение (1.6), найдем механическую характеристику двигателя постоянного тока с независимым (параллельным) возбуждением:
 . (1.7)
. (1.7)
Анализируя уравнения (1.6) и (1.7), видим, что это уравнение прямой линии. Естественными характеристиками двигателя являются механические (электромеханические) при номинальных значениях напряжения, потока и отсутствии внешних резисторов в якорной цепи, например, формулы (1.6) и (1.7), и, соответственно, искусственными будут являться механические (электромеханические) характеристики при отличных от номинального значения напряжения сети, потока двигателя (при введении внешнего резистора в цепь обмотки возбуждения) или при введении внешнего резистора в якорную цепь, например
![]() .
.
Величина U с /(К*Ф) = ω о называется скоростью идеального холостого хода, а соотношения I я *(R я /(К*Ф))=М*(R я /(К*Ф) 2)= называют статическим перепадом скорости. Тогда правомерна формула ω = ω o - ω; (1.8) Для построения естественной характеристики необходимо найти две точки. Одна из них определяется из паспортных данных двигателя для номинальных значений n н, I н и М н:
ω н = n н /30 = 0,105n н, М н = P н / ω н,
где P н – номинальная мощность двигателя, Вт; n н – номинальная частота вращения двигателя, об/мин. Вторая точка соответствует идеальному холостому ходу, когда I = 0; М = 0. Ее можно найти из уравнения (1.6) при подстановке паспортных данных двигателя:
 ; (1.9)
; (1.9)
Если неизвестна величина сопротивления обмотки якоря, то можно воспользоваться приближенной формулой при условии, что половина потерь мощности связана с потерями в меди обмотки якоря, т.е.
I н 2 *Rя 0,5*(1-)*U н *I н, (1.10)
Где η – коэффициент полезного действия (КПД) электродвигателя, равный отношению полезной мощности P н = M н *ω н к полной мощности, потребляемой двигателем P полн = U н *I н. Из формулы (1.10) находим
R я 0,5*(1-)*U н /I н; (1.11)
R я = (U н *I н -P н)/(2*I н 2) . (1.12)
При пуске двигателя постоянного тока начальная скорость якоря ω = 0. Тогда согласно уравнению (1.6) пусковой ток I п =U н /R н. По условиям коммутации для ДПТ НВ принимают, если отсутствуют паспортные данные,
I макс = (22,5)*I я. (1.13)
Дальнейшее увеличение тока приводит к появлению кругового огня на коллекторе и выходу из строя электродвигателя. Из этих соображений следует, что максимальный момент двигателя также следует принимать равным
М макс = (,5)*М н. (1.14)
Для ограничения пускового тока необходимо снизить величину напряжения источника питания в период пуска или ввести в цепь якоря добавочное сопротивление. Тогда I п1 =U н /(R я +R 1) и I п1  I макс. По мере разгона якоря в его обмотке увеличивается э.д.с. Е, в связи с чем уменьшается ток якоря
I макс. По мере разгона якоря в его обмотке увеличивается э.д.с. Е, в связи с чем уменьшается ток якоря
I я = (U н - E)/(R я +R 1).
Одновременно с уменьшением тока уменьшается и момент двигателя, а, следовательно, и ускорение двигателя. Для поддержания постоянного ускорения привода принимают такую схему включения добавочного сопротивления при пуске, чтобы она позволяла при достижении момента переключения уменьшать внешнее сопротивление, что приведет к росту тока и момента двигателя при значении э.д.с. Е в момент переключения.
Реостатное регулирование частоты вращения
Осуществляется путем введения в цепь якоря дополнительных активных сопротивлений – резисторов, т.е. R яц = R я +R 1 = var при U = U н, Ф = Ф н,. Как видно из уравнения электромеханической характеристики (1.6) изменяется только крутизна (жесткость) характеристики (рис.4,б). По условию допустимого нагрева ток якоря не должен превышать номинальное значение, т.е. I я доп = I ян, тогда М доп = К*Ф н *I я доп = К*Ф н *I ян = М н. В этом случае, реостатное регулирование осуществляется при постоянном допустимом статическом моменте. Механические характеристики ДПТ НВ при реостатном регулировании имеют ступенчатый вид, диапазон регулирования достигает Д = 2 – 2,5, мощность при этом регулировании составляет
Р в = U н *I я = ω o *M = const . (1.15)
Механическая мощность на валу двигателя равна
P м = ω*M, (1.16)
а КПД двигателя в этом случае будет равно
= Р м /Р е = (ω*M)/(ω o *M) = ω/ω о. (1.17)
Регулирование частоты вращения при изменении магнитного
потока
Такой способ регулирования осуществляется за счет ослабления магнитного потока возбуждения двигателя. Из уравнения (1.6) электромеханической характеристики (ЭМХ) можно определить значение К*Ф.
К*Ф = (U н -I н *R я)/ω, (1.18)
Тогда величина допустимого момента будет равна
М доп = К*Ф*I н = (U н -I н *R я)*I н /ω. (1.19)
В соответствии с уравнением (1.19) зависимость момента от частоты вращения представляет гиперболу. ЭМХ имеют общую точку I к.з. при ω = 0. Механические характеристики имеют разные значения моментов короткого замыкания М к..з. при ω = 0 из-за ослабления магнитного потока.

Рис.3. Механические и электромеханические характеристики ДПТ НВ при ослаблении магнитного потока.
Регулирование частоты вращения ДПТ НВ при изменении питающего напряжения
При рассмотрении данного способа необходимы регулируемые источники напряжения. Из уравнения электромеханической характеристики видно, что с регулированием напряжения связано изменение скорости идеального холостого хода ω о = U н /(К*Ф н) при сохранении жесткости характеристик = (К*Ф) 2 /R я. Последнее позволяет существенно расширить диапазон регулирования. Другим достоинством способа является регулирование в цепях управляющих устройств (обмотка возбуждения системы Г-Д), угол запирания вентиля (ТП-Д), мощность управления которых значительно меньше по сравнению с главными силовыми цепями. Регулирование частоты вращения идет, как правило, вниз от основной скорости. Искусственные характеристики при изменении U c будут иметь вид прямых, показанных на рис.4,а. а) б)

Рис.4. Механические характеристики ДПТ НВ при изменении напряжения питания и при реостатном регулировании

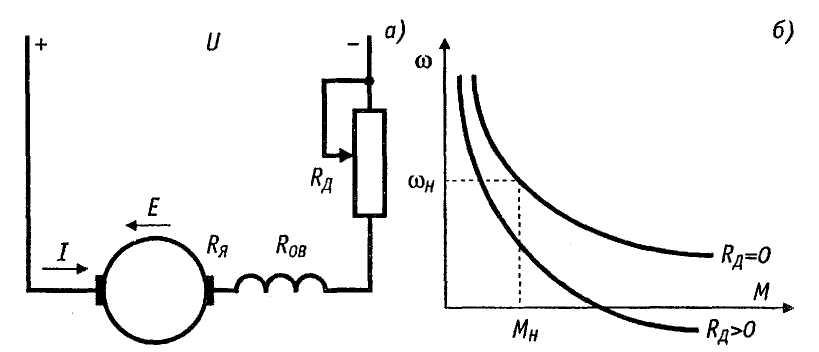
Рис. 4.1. Схема включения в сеть ДПТ параллельного возбуждения
На рис. 4.1. показана схема включения в сеть двигателя постоянного тока (параллельного возбуждения).
Режимы торможения двигателя постоянного тока независимого
возбуждения
Для двигателя постоянного тока независимого возбуждения характерны три вида электрического торможения:
- Генераторное (рекуперативное) торможение. Динамическое торможение. Торможение противовключением.
Рекуперативное торможение
Условием генераторного торможения является ω > ω о. При этом э. д. с. обмотки якоря Е будет больше приложенного напряжения сети U н. Тогда ток якоря I я = (U н -E)/R я изменит направление, а, следовательно, поменяет направление момент и станет тормозным
М г = -К*Ф н *I я.
Уравнение ЭМХ характеристики двигателя постоянного тока в рекуперативном торможении получим из уравнения (1.6 - ) после подстановки значения Е:
 , (1.20)
, (1.20)
Сравнивая уравнения (1.6 - ) и (1.20) видим, что характеристики проходят при I я = 0 через ω о и ЭМХ ДПТ НВ в режиме рекуперативного торможения являются продолжением двигательного режима. Например, при снижении напряжения на обмотке якоря ДПТ НВ наблюдается генераторное торможение (рис.5, характеристика 5 выше скорости идеального холостого хода до т. б).
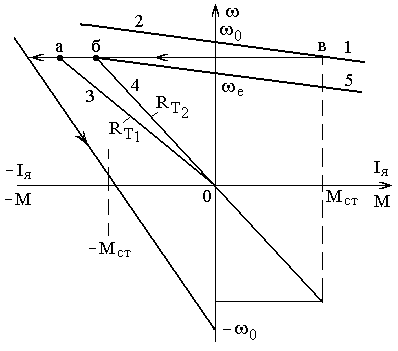
1 – двигательный режим; 2 – рекуперативное торможение;
3, 4 – динамическое торможение при R T 1 < R T 2 ;
5 – двигательный режим при U < U н
Рис.5 Электромеханические и механические характеристики ДПТ НВ
в режимах торможения
Динамическое торможение
Известны два вида динамического торможения: 1) с независимым возбуждением, когда обмотка возбуждения питается от постоянного источника; 2) с самовозбуждением, когда обмотка возбуждения подключается к якорю. Условия динамического торможения: 1. Якорь отключается от питающей сети;

Рис.6. Динамическое торможение c независимым возбуждением
2. Якорь после отключения от сети замыкается на добавочное сопротивление (рис.6). В режиме динамического торможения источником тока является э. д. с. якоря Е, тогда I т =-Е/R яц, т. е. ток меняет свое направление и создает тормозной момент. Тогда ЭМХ ДПТ НВ находится из основного уравнения (1.21)
ω = -I я *R яц /(К*Ф), (1.21)
Где R яц =R я +R т представляет прямую линию, проходящую через начало координат (рис.5 прямые 3 и 4).
Торможение противовключением
Существуют два вида торможения противовключением для ДПТ НВ. 1. При активном статическом моменте, когда в цепь якоря вводят большое добавочное сопротивление R 1 . Ток якоря в этом случае уменьшается, момент двигателя М становится меньше статического момента М cа и двигатель начинает снижать обороты, а затем под влиянием М cа реверсируется и разгоняется в направлении, противоположном действию момента двигателя (рис.7, прямая вг ).

Рис.7. Механические характеристики ДПТ НВ при торможении
противовключением
Ток в режиме торможения противовключением по мере снижения оборотов увеличивается, поскольку с изменением направления вращения ω< 0 э. д. с. изменит свой знак (участок вг) и будет действовать согласно с напряжением сети, вследствие чего ток станет равным I я = (U н +Е)/R яц и растет до значения, при котором тормозной момент достигает величины М cа. Наступит установившийся режим торможения при -ω е. ЭМХ может быть получена из уравнения (1.6 - ) и является аналогичной двигательному режиму. 2. При реактивном статическом моменте торможение противовключением получают путем изменения полярности напряжения на зажимах якоря. В этом случае ток I я = (-U н -Е)/R яц меняет свое направление и момент двигателя становится тормозным. Для ограничения тока при торможении противовключением по условиям коммутации или допустимым ускорениям включают добавочное сопротивление в цепь якоря. Тогда уравнение ЭМХ двигателя в режиме торможения противовключением получим из уравнения (1.6 - ) и после подстановки в него -U н получим
ω =- ω о - I я *R яц /(К*Ф н ) (1.22)
Характеристика проходит через w о и w с (рис.7). Если при ω = 0; М c1 < М к, то двигатель изменит направление вращения (реверс) и станет вращаться с частотой ω с1 . Если при ω = 0, М c1 > М к, то якорь двигателя будет обтекаться током, оставаясь в неподвижном состоянии, поскольку ток якоря I я меньше I с. Сравнение энергетических показателей динамического торможения и торможения противовключением показывает, что потери электроэнергии в якорной цепи в режиме противовключением относятся к потерям при динамическом торможении, как 3:1 , а при реверсе – 4:1 .
Передаточная функция двигателя постоянного тока с независимым возбуждением
 , передаточная функция двигателя по управляющему воздействию при регулировании скорости изменением напряжения якоря, где:
, передаточная функция двигателя по управляющему воздействию при регулировании скорости изменением напряжения якоря, где: Анализ и обобщение опыта и тенденций создания промышленных роботов в отечественной и зарубежной робототехнике показывает, что все большее распространение получает электромеханический привод промышленных роботов. Впоследние год
ДокументАнализ и обобщение опыта и тенденций создания промышленных роботов в отечественной и зарубежной робототехнике показывает, что все большее распространение получает электромеханический привод промышленных роботов.
Книга первая (1)
КнигаОн подобен человеку, строящему дом, который копал, углубился и положил основание на камне, почему, когда случилось наводнение, и вода наперла на этот дом, то не могла поколебать его, потому что основан был на камне.
32. Механические характеристики ЭД постоянного тока
Двигатель постоянного тока последовательного возбуждения: Уравнение механической характеристики имеет вид:
 ,
где ω - частота вращения, рад/с; Rob -
сопротивление обмотки последовательного
возбуждения, Ом; α- коэффициент линейной
зависимости (в первом приближении)
магнитного потока от тока якоря.
,
где ω - частота вращения, рад/с; Rob -
сопротивление обмотки последовательного
возбуждения, Ом; α- коэффициент линейной
зависимости (в первом приближении)
магнитного потока от тока якоря.
Из рассмотрения рис. следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения и резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 -- 0,25) IН0М; только двигатели малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением.
Двигатель постоянного тока независимого возбуждения: Характерной особенностью двигателя является то, что его ток возбуждения не зависит от тока якоря (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. Следовательно, механическая характеристика будет линейной.
Уравнение
механической характеристики имеет
вид: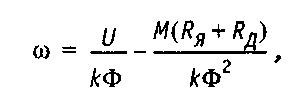 где
ω - частота вращения, рад/с; U - напряжение,
приложенное к цепи якоря, В; Ф - магнитный
поток, Вб; Rя, Rд - сопротивление якоря
и добавочное в его цепи, Ом: α-
конструктивная постоянная двигателя.
где
ω - частота вращения, рад/с; U - напряжение,
приложенное к цепи якоря, В; Ф - магнитный
поток, Вб; Rя, Rд - сопротивление якоря
и добавочное в его цепи, Ом: α-
конструктивная постоянная двигателя.
где р - число пар полюсов двигателя; N - число активных проводников якоря двигателя; α - число параллельных ветвей обмотки якоря. Вращающий момент двигателя, Н*м.
 -
ЭДС двигателя постоянного тока, В. При
постоянном магнитном потоке Ф = const,
полагая с=к Ф,Тогда
выражение для вращающего момента, Н*м:
-
ЭДС двигателя постоянного тока, В. При
постоянном магнитном потоке Ф = const,
полагая с=к Ф,Тогда
выражение для вращающего момента, Н*м:
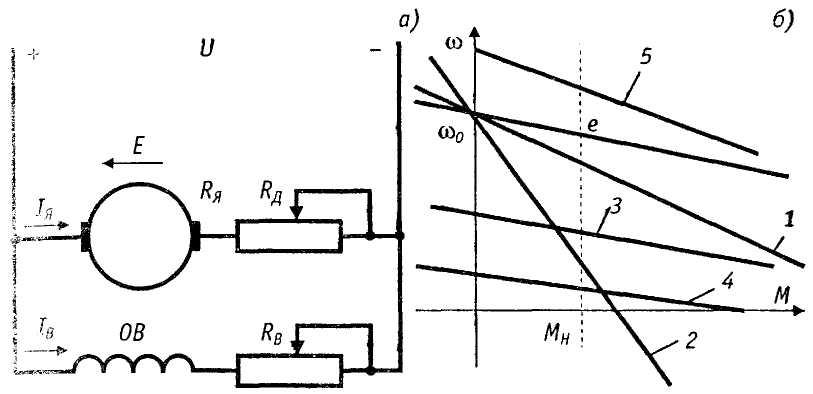
1. Механическая характеристика е, полученная для условий Rд = О, Rв = 0, т.е. напряжение на якоре и магнитный поток двигателя равны номинальным значениям, называется естественной (рис. 17.6).
2, Если Rд > О (Rв = 0), получаются искусственные - реостатные характеристики 1 и 2, проходящие через точку ω0 -скорость идеального холостого хода машины. Чем больше Яд, тем характеристики круче.3, Если изменять напряжение на зажимах якоря посредством преобразователя при условии, что Rд = 0 и Rв = 0, то искусственные механические характеристики имеют вид 3 и 4и проходят параллельно естественной и тем ниже, чем меньше величина напряжения.
4, При номинальном напряжении на якоре (Rд = 0) и уменьшении магнитного потока (Rв > 0) характеристики имеют вид5 и проходят тем выше естественной и круче ее, чем меньше магнитный поток.
Двигатель постоянного тока смешанного возбуждения: Характеристики этих двигателей являются промежуточными между характеристиками двигателей параллельного и последовательного возбуждения.
При согласном включении последовательной и параллельной обмоток возбуждения двигатель смешанного возбуждения имеет больший пусковой момент, по сравнению с двигателем параллельного возбуждения. При встречном включении обмоток возбуждения двигатель приобретает жесткую механическую характеристику. С увеличением нагрузки магнитный поток последовательной обмотки увеличивается и, вычитаясь из потока параллельной обмотки, уменьшает общий поток возбуждения. При этом скорость вращения двигателя не только не уменьшается, а может даже увеличиваться (рис.6.19). И в том, и в другом случае наличие магнитного потока параллельной обмотки исключает режим "разноса" двигателя при снятии нагрузки.


Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики можно записать в виде
![]()
где коэффициенты Се и См зависят от конструктивных данных двигателя; U - напряжение сети; Ф - магнитный поток двигателя; R - сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R", куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
Рис. 1. Механические характеристики двигателей постоянного тока: а - при изменении сопротивления в цепи ротора, б - при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в - при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г - при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем
![]()
т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
Похожие записи:
 Как тушить рыбу на сковородке
Как тушить рыбу на сковородке
 Николай Васильевич Тесленко: биография Отрывок, характеризующий Тесленко, Николай Васильевич
Николай Васильевич Тесленко: биография Отрывок, характеризующий Тесленко, Николай Васильевич
 Сметанный суп с фаршем Картофельный суп со сметаной рецепт
Сметанный суп с фаршем Картофельный суп со сметаной рецепт
 Вальдорфский салат: рецепт приготовления, ингредиенты Из какого мяса готовится салат вальдорф
Вальдорфский салат: рецепт приготовления, ингредиенты Из какого мяса готовится салат вальдорф
 Крем «Шантильи». Рецепты. Секреты приготовления оригинального шантильи Заварной крем для торта «Наполеон»
Крем «Шантильи». Рецепты. Секреты приготовления оригинального шантильи Заварной крем для торта «Наполеон»





