Механические характеристики двигателя постоянного тока независимого возбуждения. Возбуждение в двигателях постоянного тока
Cтраница 1
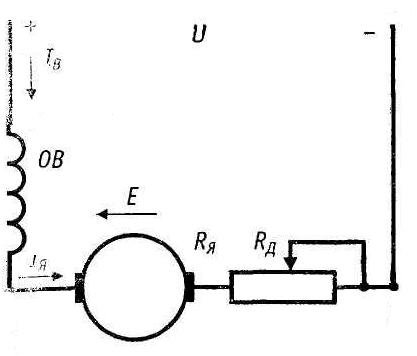
Двигатель постоянного тока независимого возбуждения, скорость вращения которого регулируется напряжением на якоре.
Двигатели постоянного тока независимого возбуждения используются в механизмах ЭТУ в тех случаях, когда необходимо глубокое регулирование скорости при высоком качестве переходных процессов.
Двигатель постоянного тока независимого возбуждения питается через две группы тиратронов. Одна пара TI и Г3 служит для питания обмотки якоря, вторая пара Т3 я Т - для питания обмотки возбуждения.
Двигатели постоянного тока независимого возбуждения применяются, главным образом там, где по условиям работы требуется глубокое и плавное регулирование скорости, а также в тех случаях, когда необходима работа привода с низкой скоростью.
Для двигателей постоянного тока независимого возбуждения при постоянной величине магнитного потока ф фном момент пропорционален току, поэтому можно пользоваться эквивалентным моментом.
Для двигателя постоянного тока независимого возбуждения - это скорость идеального холостого хода, определяемая соотношением f / max / C, для гидропривода - скорость, развиваемая исполнительным органом при полном открытии каналов в распределителе, полном использовании давления питания и отсутствии силы сопротивления.
| Принципиальная схема присоединения реле противовключения.| Характеристики напряжения на реле противовключения для разных точек присоединения реле (двигатель постоянного тока независимого возбуждения. |
Для двигателя постоянного тока независимого возбуждения величины U , R и Ф постоянны; поэтому для данной точки присоединения реле, когда Rx также постоянно, зависимость Upn - f (w) линейна.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением магнитного потока как в двигательном, так и в генераторном режимах представляет собой однозонное регулирование вверх. Поскольку номинальное значение магнитного потока является наибольшим, то изменение потока возможно лишь в сторону уменьшения по сравнению с номинальным. Последнее приводит к увеличению скорости двигателя во всех режимах работы.
Доброго времени суток, дорогие читатели! В этой статье я расскажу о том, что такое возбуждение в двигателях постоянного тока и «с чем его едят».
Наверное, каждый из нас в детстве имел игрушки с электроприводом. Те же, кто в те годы отличался любопытностью, не упустили возможность разобрать эти игрушки, дабы посмотреть, а что там внутри.
Заглянув внутрь такой игрушки, нами был найден маленький электромоторчик постоянного тока. Естественно, тогда мы и не задумывались над тем, почему он работает. Некоторые из нас, найдя в игрушке моторчик, решались разобрать и его. Вот эти-то любопытные товарищи, разобрав моторчик, находили там постоянный магнит (иногда не один), щетки и якорь с коллектором.
Так вот, как раз постоянный магнит и является простейшей системой возбуждения для моторов постоянного тока . Ведь якорь моторчика вращается только тогда, когда вокруг него присутствует постоянное магнитное поле, которое и создается при помощи постоянного магнита.
Двигатели постоянного тока промышленных масштабов, в качестве возбудителей, используют специальные обмотки, именуемые обмотками возбуждения.
Подключение же этих обмоток может быть самым различным. Они могут включаться параллельно якорю, последовательно с ним, смешано и, даже, независимо от них.
Кстати, моторчики, имеющие в качестве возбудителя постоянный магнит, считаются устройствами с независимым возбуждением.
Возбуждающая обмотка состоит из значительно большего числа витков, нежели якорная. В связи с этим, ток якорной обмотки в десятки раз превосходит ток возбуждающей. Скорость вращения такого движка может меняться в зависимости от нагрузки и магнитного потока. Благодаря свойствам подключения, движки параллельного включения довольно мало подвержены перемене частоты вращения.
Теперь рассмотрим вариант раздельного подключения рабочей и возбуждающей обмоток. Такой движок именуется мотором с независимым возбуждением. Скорость такого движка может регулироваться при помощи смены сопротивления якорной цепи или магнитного потока.
Тут есть небольшой нюансик: не стоит слишком уменьшать ток возбуждения при таком включении двигателя, поскольку это чревато очень большим подъемом якорного тока. Тем же самым опасен и обрыв цепи возбуждения этих двигателей. Кроме того, если нагрузка мотора с таким включением мала, либо при его включении на холостой ход может произойти такой сильный его разгон, что возникнет опасность для движка.
Как я уже говорил, разновидностью ДПТ независимого возбуждения считаются устройства, имеющие в качестве возбудителя постоянные магниты. Скажу несколько слов и о них.
Поскольку ДПТ и машины синхронного типа могут использовать вместо возбудителей постоянные магниты, то подобный вариант считается достаточно привлекательным. И вот почему:
- у такого устройства снижено потребления тока за счет уменьшения числа обмоток, в результате чего такие показатели подобных машин, как КПД, оказываются выше;
- с использованием вместо возбудителя постоянных магнитов упрощается конструкция возбуждающих цепей движка, что повышает его надежность, ведь постоянный магнит не требует питания, следовательно, у такого мотора нет токосъемного узла на роторе.
Теперь о последовательном включении обмоток (двигатели с последовательным возбуждением).
В этом варианте подключения, якорный ток будет являться и возбуждающим. Это становится причиной изменения магнитного потока в сильной зависимости от нагрузки. Это является причиной большой нежелательности пуска их на холостом ходу и при маленькой нагрузке.
Применение же такое включение нашло там, где требуется значительный момент пуска, либо возможность выдерживания кратковременных перегрузок. В связи с этим, их применяют, как средства тяги для трамваев, троллейбусов, электровозов, метро и подъемных кранов. Кроме того, их применяют, как средство запуска для ДВС (в качестве стартеров).
Последним вариантом включения движков постоянного тока считается их смешанное включение. Каждый из полюсов этих моторов оснащен парой обмоток, одна из которых параллельная, а другая – последовательная. Подключать их возможно двумя способами:
- согласный метод (в этом случае токи складываются);
- встречный вариант (вычитание токов).
Соответственно, в зависимости от варианта подключения (от чего меняется и соотношение магнитных потоков), такой мотор может оказаться приближен либо к устройству, имеющему последовательное возбуждение, либо к движку с параллельным возбудом.
В большинстве случаев, основной обмоткой у них считают последовательную обмотку, а параллельную – вспомогательной. За счет параллельной обмотки у таких моторов скорость при небольших нагрузках практически не растет.
Если требуется получение значительного момента при пуске и возможность регулирования скорости на переменных нагрузках, используется подключение согласного типа. Встречное же подключение используется при необходимости получения постоянной скорости при изменяющейся нагрузке.
Если возникает необходимость реверсирования ДПТ (смены направления его вращения), то меняют направление тока в одной из его рабочих обмоток.
Методом смены полярности подключения клемм двигателя возможно поменять направление только тех моторов, которые включены по независимой схеме, либо движков с постоянным магнитом в качестве возбудителя. Во всех иных устройствах необходима смена направления тока в одной из рабочих обмоток.
Кроме того, движки постоянного тока нельзя включать методом подключения полного напряжения. Это связано с тем, что величина их пускового тока примерно в 2 десятка раз выше номинального (это зависит от размеров и скорости двигателя). Токи пуска движков больших размеров могут и в полсотни раз превосходить их номинальный рабочий ток.
Токи больших величин способны вызвать эффект кругового искрения коллектора, в результате чего коллектор разрушается.
Чтобы выполнить включение ДПТ, используется методика , либо применение пусковых реостатов. Включение прямого типа возможно лишь на небольших напряжениях и для маленьких движков, имеющих большое сопротивление якорной обмотки.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
§ 115. Характеристики двигателей постоянного тока
Рабочие свойства двигателей определяются их рабочими характеристиками, представляющими собой зависимости числа оборотов n , вращающего момента М э, потребляемого тока I 1 , мощности P 1 и к. п. д. η от полезной мощности на валу Р 2 , т. е.
n ; М э; I 1 ; P 1 ; η = f (Р 2).
Эти зависимости соответствуют естественным условиям работы двигателя, т. е. машина не регулируется и напряжение сети остается постоянным. Так как при изменении полезной мощности Р
2 (т. е. нагрузки на валу) изменяется также и ток в якоре машины, то рабочие характеристики часто строятся в зависимости от тока в якоре. Мы рассмотрим зависимость вращающего момента и скорости вращения от тока в якоре для двигателей с различным возбуждением.
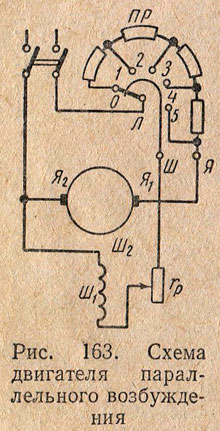
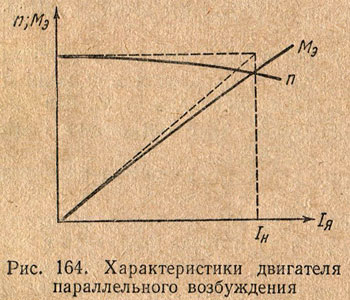
Характеристики двигателя параллельного возбуждения изображены на рис. 164, а схема его показана выше (см. рис. 163).
Число оборотов двигателя определяется следующим выражением:
С увеличением нагрузки на валу двигателя повышается также и ток в якоре. Это вызывает увеличение падения напряжения в сопротивлении обмотки якоря и щеточных контактах (I
я r
я).
Как ток возбуждения, так и магнитный поток остаются неизменными. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Φ несколько уменьшится. Увеличение I
я r
я вызывает уменьшение скорости двигателя, а уменьшение Φ увеличивает его скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
Вращающий момент двигателя равен:
М э = k ΦI я. (151)
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.

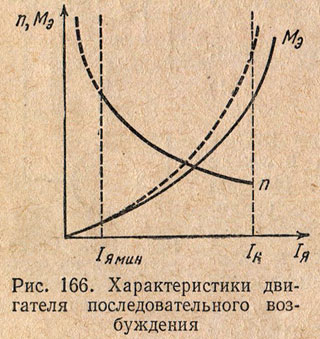
Схема двигателя последовательного возбуждения показана на рис. 165. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 166.
Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где r
c - сопротивление последовательной обмотки возбуждения.
В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падение напряжения в сопротивлении якоря и обмотки возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (I
я ≈ 0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимально допустимую нагрузку, составляющую 25 - 30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому в случаях, когда возможны сбросы или резкие уменьшения нагрузок, использовать двигатели последовательного возбуждения нельзя.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут являться для него достаточно большой механической нагрузкой.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Φ = с′I
я), можно определить следующим выражением:
М э = k ΦI я = k ′I 2 я, (153)
где с
′ и k′ - некоторые постоянные величины; k′ = k
· c′, т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и при перегрузках. Эти двигатели широко используются в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения. С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем в двигателях параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет в разнос, так как магнитный поток не уменьшается до нуля в результате наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения происходит увеличение магнитного потока и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей степени, чем в двигателях последовательного возбуждения.
Классификация и основные уравнения двигателей постоянного тока
Двигатели постоянного тока находят широкое применение в тех случаях, когда по условиям работы исполнительного механизма требуется широкое изменение частоты вращения, и при этом часто имеют преимущества по сравнению с двигателями переменного тока. Используются они в металлургической промышленности, станкостроении, системах автоматического регулирования, широко применяются на электрическом транспорте, в авиации и автомобилестроении. Двигатели постоянного тока могут иметь мощность в пределах от нескольких ватт до нескольких тысяч киловатт.
Как и генераторы, двигатели постоянного тока классифицируют по способу включения обмотки возбуждения. Различают двигатели независимого, параллельного, последовательного и смешанного возбуждения. Электрические схемы этих двигателей аналогичны схемам соответствующих генераторов. Отличие заключается в том, что ток якоря I а в двигателях независимого и последовательного возбуждения равен сетевому току I , а в двигателях параллельного и смешанного возбуждения из сети потребляется и ток возбуждения I в.
Рассмотрим основные уравнения двигателей постоянного тока.
1. Уравнение равновесия напряжений для цепи якоря в режиме двигателя:
Упрощение уравнения производится так же, как для генераторов:
![]() (24.2)
(24.2)
2. Уравнение баланса токов для двигателей параллельного и смешанного возбуждения:
3. Уравнение движения:
 (24.4)
(24.4)
где J - момент инерции якоря двигателя и вращающихся частей приводного механизма; М- электромагнитный момент, развиваемый двигателем, М с - момент сопротивления, равный сумме моментов приводимого механизма М 2 и тормозного момента M o , обусловленного потерями внутри самого двигателя.
Уравнение частоты вращения двигателя можно получить если в(24.2) подставить вместо ЭДС его значение
Разрешив полученное уравнение относительно n получим
![]() (24.5)
(24.5)
Характеристики двигателей постоянного тока
Основными характеристиками, по которым оценивают рабочие свойства двигателей, являются:
скоростная - зависимость частоты вращения от тока якоря,
моментная - зависимость электромагнитного момента от тока якоря,
механическая- зависимость частоты вращения от электромагнитного момента, п =f(M).
Двигатели независимого и параллельного возбуждения. Все характеристики этих двигателей получают при постоянных значениях напряжения сети и тока возбуждения, обычно соответствующих своим номинальным значениям: U= U ном; I B = I в.ном.
1. Скоростная характеристика n=f(I a). Выражением, определяющим эту характеристику, является уравнение (24.5). Как следует из этого уравнения, если магнитная цепь двигателя ненасыщена и магнитный поток Ф = const, то зависимость п(I а) линейная и с ростом тока якоря частота вращения уменьшается. Этому случаю соответствует сплошная линия на рис. 24.1.
Поток якоря вызывает уменьшение потока возбуждения (), то выражение для частоты вращения будет иметь вид
 (24.6)
(24.6)
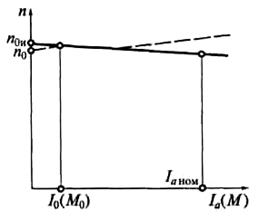
Рис.24.1. Скоростная(механическая)характеристика двигателя независимого возбуждения
где Ф 0 - магнитный поток, соответствующий номинальному току возбуждения 1 В ном при холостом ходе двигателя; - уменьшение магнитного потока из-за размагничивающего действия реакции якоря.
Как следует из формулы (24.5), при возрастании тока якоря в результате падения напряжения частота вращения п снижается, а при уменьшении потока Ф - увеличивается. Это показано на рис. 24.1 штриховой линией.
Если относительное значение суммарного сопротивления цепи якоря больше относительного значения уменьшения потока , то частота вращения с ростом тока якоря будет уменьшаться. Если же < , то частота вращения с ростом тока якоря будет увеличиваться и такая характеристика будет неустойчивой.
2. Моментная характеристика M=f(I a). Аналитически эта характеристика описывается формулой
Как следует из этого уравнения, если магнитная цепь двигателя ненасыщена и магнитный поток Ф = const, то зависимость М(1 а) линейная и с ростом тока якоря электромагнитный момент пропорционально увеличивается. Моментная характеристика в этом случае соответствует изображенной на рис. 24.2 прямой сплошной линии, выходящей из начала координат.
Действительная моментная характеристика вследствие уменьшения магнитного потока из-за размагничивающего действия реакции якоря () будет отклоняться от прямой линии (штриховая линия на рис. 24.2).
3. Механическая характеристика n=f(M). Аналитическое выражение механической характеристики можно получить из уравнения (24.6), если выразить в нем ток якоря 1 а через электромагнитный момент (). Тогда
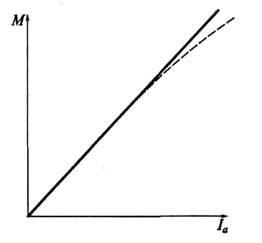
Рис. 24.2. Моментная характеристика двигателя независимого(параллельного)возбуждения
Из уравнения (24.7) следует, что механическая характеристика двигателя имеет такой же вид, как и скоростная, т.е. изображенная на рис. 24.1 скоростная характеристика в другом масштабе будет являться механической характеристикой.
Работа двигателя при I а = 0 и М = 0 называется идеальным холостым ходом. Согласно уравнению (24.7), частота вращения при идеальном холостом ходе
![]() (24.8)
(24.8)
В двигателях независимого возбуждения изменение частоты вращения при переходе от холостого хода (М= М 0) к номинальной нагрузке (М= М ном) составляет лишь 2... 5 %. Такие слабопадающие механические и скоростные характеристики называются жесткими.
Двигатели последовательного и смешанного возбуждения. Особенностью двигателя последовательного возбуждения является то, что его ток возбуждения равен току якоря (I В = I а), и поэтому для вывода выражений, определяющих вид его характеристик, предварительно необходимо определить связь между магнитным потоком Ф и током якоря I а = I в. Зависимость Ф =f(I a) называется магнитной характеристикой. Идеальная магнитная характеристика (без учета размагничивающего действия реакции якоря) показана рис. 24.3 сплошной линией, а реальная (с учетом реакции якоря) - штриховой.

Рис. 24.3. Магнитная характеристика двигателя последовательного вобуждения
Все характеристики двигателя последовательного возбуждения получают при постоянном напряжении питания (обычно при U= U H 0 M).
1. Скоростная характеристика п = f(I a). Подставив в уравнение (24.5) выражение для потока в зависимости от тока якоря в соответствии с магнитной характеристикой, получим формулу скоростной характеристики двигателя. Для упрощения анализа пренебрежем насыщением магнитной цепи и будем считать магнитную характеристику линейной:
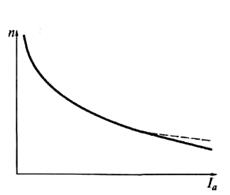
Рис.24,4. Скоростная характеристика двигателя последовательного возбуждения

Рис.24.5. Моментная характеристика двигателя последовательного возбуждения
Тогда, подставив выражение (24.9) в уравнение (24.5), получим
Из уравнения (24.10) следует, что скоростная характеристика имеет гиперболический вид; на рис.24.4 она изображена сплошной линией. Особенностью скоростной характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (24.10)следует также, что ось ординат (ось п) является для этой характеристики асимптотой.
Реальная скоростная характеристика с учетом размагничивающего действия реакции якоря будет отклоняться от гиперболической кривой вверх, как показано штриховой линией на рис. 24.4.
2. Моментная характеристика M-f(I a). Подставив в уравнение для момента выражение (24.9), получим формулу для электромагнитного момента двигателя с последовательным возбуждением:
![]() (24.11)
(24.11)
Из выражения следует, что электромагнитный момент двигателя последовательного возбуждения пропорционален квадрату тока якоря, т.е. моментная характеристика имеет параболический вид; на рис.24.5 она изображена сплошной линией. С учетом размагничивающего действия реакции якоря момент в области больших токов будет меньше момента, получаемого по выражению (24.11) (штриховая линия на рис. 24.5).
3.Механическая характеристика п =f(М). Из выражения (24.11) ток якоря
![]() (24.12)
(24.12)
Тогда, подставив (24.12) в (24.10), получим аналитическое выражение для механической характеристики:
Из выражения (24.13) следует, что механическая характеристика двигателя последовательного возбуждения при U= const так же, как и его скоростная характеристика, имеет практически гиперболический вид (рис.24.6).

Рис. 24.6. Механическая характеристика двигателя последовательного возбуждения
Особенностью механической характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (24.13) следует также, что ось ординат (ось п) является асимптотой для этой характеристики.
При частота вращения двигателя стремится к бесконечности. В этом случае говорят, что двигатель идет вразнос. Чрезмерное повышение частоты вращения опасно для механической прочности якоря, так как из-за больших значений центробежных сил, возникающих в этом случае, может нарушиться целость бандажей, удерживающих обмотку якоря, и произойти разрушение коллектора. Следовательно, нельзя допускать работу двигателя последовательного возбуждения при холостом ходе и малых нагрузках, т. е. нагрузка не должна быть меньше 25... 31 % номинальной. Лишь для двигателей малой мощности (десятки ватт) допустима работа при холостом ходе, так как их собственный момент потерь М 0 достаточно велик.
Вследствие сильной зависимости частоты вращения от нагрузки механические и скоростные характеристики двигателей последовательного возбуждения называют мягкими.
Характеристики двигателей смешанного возбуждения занимают промежуточное положение между соответствующими характеристиками двигателей параллельного и последовательного возбуждения. При слабой последовательной обмотке они будут приближаться к характеристикам двигателя параллельного возбуждения, а при сильной - к характеристикам двигателя последовательного возбуждения.
Сравнение характеристик двигателей. Двигатели параллельного (независимого) возбуждения имеют жесткую механическую характеристику и поэтому применяются в установках, где необходимо поддерживать постоянную частоту вращения при изменении момента нагрузки, например, в станках, прокатных станах, вентиляторах и т.д. Они также широко применяются при необходимости регулирования частоты вращения в широком диапазоне. В этом случае подводимое к якорю двигателя напряжение изменяется в широких пределах, в то время как напряжение возбуждения остается неизменным.
В двигателях последовательного возбуждения электромагнитный момент имеет квадратичную зависимость от тока якоря, поэтому их применение предпочтительно, когда требуются большие пусковые моменты и наблюдаются частые перегрузки по моменту. Связано это с тем, что при одних и тех же колебаниях момента сопротивления ток и потребляемая мощность у двигателей последовательного возбуждения изменяются существенно меньше, чем у двигателей параллельного возбуждения. Двигатели последовательного возбуждения находят широкое применение на электрическом транспорте и в подъемных устройствах.
Электродвигатели, работающие на постоянном токе, используются не так часто, как двигатели переменного тока. Ниже приведем их достоинства и недостатки.
В быту двигатели постоянного тока нашли применение в детских игрушках, так как источниками для их питания служат батарейки. Используются они на транспорте: в метрополитене, трамваях и троллейбусах, автомобилях. На промышленных предприятиях электродвигатели постоянного тока применяются в приводах агрегатов, для бесперебойного электроснабжения которых используются аккумуляторные батареи.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь , подключающийся к источнику питания через щеточный аппарат . Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения) . Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
Щеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Схемы включения двигателя постоянного тока
Наличие обмоток возбуждения – отличительная особенность машин постоянного тока. От способов их подключения к сети зависят электрические и механические свойства электродвигателя.
Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.

Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.

Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.

Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений.