Вращающееся магнитное поле асинхронного двигателя. Вращающееся магнитное поле. Схема замещения асинхронного двигателя
Во всех режимах работы асинхронный машин всегда присутствует вращающееся магнитное поле статора. Оно создаётся тремя обмотками, сдвинутыми в пространстве относительно друг друга на 120 градусов, скорость этого вращения равна:
где:
n1 – Скорость вращения магнитного поля статора;
f – Частота питающей сети (50Гц);
Обмотка статора может быть однофазной или трехфазной. Проанализирован трехфазный двигатель, катушки которого размещены во внутренних канавках статора. Обмотка ротора также трехфазная и размещена на поверхности цилиндра. В простом случае он закорочен. Когда обмотка статора подается трехфазным током, создается вращающееся магнитное поле, скорость которого равна.
Асинхронный преобразователь частоты
Эти двигатели всегда имеют скорость, меньшую, чем соответствующая ему формула. Ротор обычно представляет собой белую клетку или короткое замыкание, так как он имеет несколько проводников, которые закорочены в роторе. В этом случае нет обмотки. Белую клетку можно представить как многофазную обмотку, число пар полюсов которой равно числу пар полюсов вращающегося поля. Когда клетка белки считается многофазной обмоткой, предполагается, что она соединена звездами и короткозамкнута.
p – Количество пар полюсов (max 12 min 2);
Из формулы понятно, что скорость вращения магнитного поля статора асинхронной машины зависит от: частоты питающей сети, на территории стран СНГ она постоянна и равняется 50Гц, от количества пар полюсов в статоре асинхронной машины. Скорость вращения ротора синхронной машины напрямую зависит от скорости вращения магнитного поля статора.
Переменное магнитное поле статора индуцирует синусоидальные токи в проводниках короткозамкнутой клетки ротора. Эти индуцированные токи, в свою очередь, создают магнитное поле в роторе, которое противодействует индуктору поля статора. Когда полюса одного и того же имени отталкиваются, создается сила в направлении вращения ротора.
Электромагнитные состояния трехфазной обмотки статора
Поскольку упомянутая скорость несколько ниже, этот двигатель считается асинхронным, то есть без синхронизации. Это операция машины в режиме двигателя и очевидна в этом случае. Из этого следует, что в режиме двигателя. Обратите внимание, что этот двигатель не запускается, т.е. ускоряется от нулевой скорости до номинальной. Силы, действующие на короткозамкнутые стержни, противостоят друг другу, предотвращая вращение. Поэтому при запуске используется вспомогательная катушка поля, смещенная на 90 ° от катушек основного поля, которая создает вспомогательное магнитное поле для запуска.
Так же известно, что в их конструкции присутствует ротор, вращающаяся часть, которая может вращаться с различными скоростями. В целом можно сказать, что в асинхронных машинах скорость вращения изменяется только у ротора. Многочисленные наблюдения показали, что в зависимости от частоты вращения ротора асинхронной машины, с ней происходят различные явления. Для упрощения понимания этого вопроса, был введен параметр S – разность скоростей вращения магнитного поля статора, от скорости вращения ротора:
Таким образом, начальный результирующий поток будет смещен относительно оси абсцисс, и произойдет вращательный крутящий момент. После запуска больше нет необходимости в начале обмотки, так как инерция самого ротора составляет такие силы, которые поддерживают вращение.
Однофазный 2-полюсный асинхронный двигатель. Однофазный асинхронный двигатель. Они наиболее часто используются в промышленности. Источник переменного тока подает статор. Статор состоит из сердечника, внутри которого расположены пары обмоток, симметрично расположенных под углом 120 °.

Скольжение
Эти скорости обозначают буквенно: n – скорость вращения ротора; n1 – скорость вращения магнитного поля.
Режим работы асинхронной машины зависит именно от этого значения разности скоростей вращения магнитного поля статора и скорости вращения ротора.
Принципы конструкции и эксплуатации Конструкция двигателя Двигатели переменного тока состоят из статора и ротора. Статор или неподвижная часть, образованная изолированными и рифлеными магнитными пластинами внутри. Ротор или движущаяся часть образованы изолированными и внешними рифлеными магнитными пластинами. В обмотке ротора есть две возможности: - Медные или алюминиевые стержни, которые вводятся в эти пазы, короткие замыкания на обоих концах, что приводит к возникновению асинхронных трехфазных двигателей ротора при коротком замыкании. - Трехфазная обмотка, аналогичная статору, что приводит к возникновению к асинхронным электродвигателям намотки ротора. Воздушный зазор между статором и ротором называется воздушным зазором. На рисунке 43 показано расположение ротора, статора и воздушного зазора двигателя переменного тока. Принцип работы основан на вращающемся магнитном поле, которое создает трехфазный переменный ток. Двигатель, показанный на фиг. 44, образован парой соответствующих полюсов фазы с соответствующими обмотками, концы которых соединены в общей точке. Мы применяем трехфазную систему сбалансированных напряжений по принципам обмоток. Например, в момент 1 ток в фазе а имеет значение 10 А и является положительным, а в фазах Ь и с токи 5 А и отрицательны. Если применить правило штопора, мы можем определить направление магнитного поля в этом случае. В момент 2, действуя таким же образом, мы видим, что магнитное поле повернулось на 60 ° и так далее до момента 7, где повторяется первая позиция. На этой скорости называется синхронной скоростью и является той, которая выполняет разделение машин переменного тока синхронно и асинхронно. Но мы вернемся к принципу работы трехфазных двигателей. Магнитное поле разрезает проводники ротора и индуцирует в них электродвижущую силу. Наведенные токи и поток определяют крутящий момент на роторе в том же смысле, что и вращающийся магнитный поле. Помните, что в трехфазных системах есть два типа соединений для катушек двигателя: подключение в линию и треугольное соединение. В треугольном соединении линейное и фазное напряжения совпадают. В треугольном соединении линейный ток в три раза превышает фазовый ток. В звездном соединении напряжение линии - это корень, в три раза больший, чем фазовое напряжение. То есть, если линейное напряжение составляет 380 В, каждая фаза подключается к разности потенциалов 220 В; линейный и фазовый токи совпадают. Таким образом, если на линии амперметрона 5А в фазе будет указано то же самое. У нас есть 3 одинаковые обмотки, распределенные в пазах статора, как можно видеть на диаграмме, показанной на рисунке Намотка статора трехфазного двигателя. Три принципа и три окончания переносятся в клеммную коробку, где сделаны соединения, как показано на рисунке. Различные способы отображения клеммной коробки трехфазного двигателя. Мотор может быть подключен звездой или треугольником, как показано на рисунке Подключение звезда и треугольник терминалов двигателя. Если мы подключим двигатель к линии напряжения 230 В, соединение будет треугольником. Это означает скорость двигателя в зависимости от мощности, которую он подает, поддерживая постоянное напряжение и частоту. На рисунке 50 видно, что скорость уменьшается очень мало за счет увеличения мощности, то есть нагрузки. Он символизирует ток, который двигатель поглощает сеть в зависимости от мощности, поддерживающей постоянное напряжение и частоту. На рисунке 51 видно, что ток увеличивается с увеличением нагрузки, но не по линейной функции. Ток, потребляемый двигателем в вакууме, составляет от 25% до 50% от номинального тока. В нем сообщается, как изменяется коэффициент мощности в зависимости от мощности, подаваемой двигателем, сохраняя постоянное напряжение и частоту. Он заинтересован в том, чтобы знать потребление активной энергии. На рис. 52 можно проверить, что коэффициент мощности при очень низких нагрузках очень мал; в вакууме близок к 0, при номинальной мощности обычно имеет максимальное значение коэффициента мощности. Это указывает на то, как производительность машины изменяется в зависимости от мощности, которую она обеспечивает. На рисунке 53 видно, что форма кривой очень быстро возрастает до достижения максимального значения, при котором фиксированные потери равны переменным, так что они могут уменьшаться более или менее медленным образом. Указывает, как крутящий момент изменяется в зависимости от частоты вращения двигателя. На рисунке 54 видно, что ордината в начале координат соответствует начальному крутящему моменту. По мере увеличения скорости он также увеличивает крутящий момент до максимального значения крутящего момента. С этого момента скорость уменьшается очень медленно, пока значение синхронной скорости, где значение, полученное машиной, равно нулю. В вакууме машина вращается со скоростью, близкой к скорости синхронизма. В механической характеристике мы можем изучить три критических рабочих точки, которые являются началом, работой вакуума и стабильной работой под нагрузкой. Запуск При запуске скорость равна нулю, а пусковой момент двигателя должен быть больше, чем сильный крутящий момент нагрузки. Вакуумная работа Если двигатель работает на холостом ходу, скорость близка к синхронизму, поскольку двигатель не обеспечивает полезную мощность. Единственным моментом, который развивает двигатель, является тот, который соответствует компенсации потерь. Стабильная работа при нагрузке. Рабочая точка - это точка, в которой пересекаются характеристики двигателя и нагрузки. Потери в железе из-за цикла гистерезиса и потерь на вихревые токи. На рисунке 55 показана диаграмма баланса мощности двигателя переменного тока. Схематическое представление баланса мощности. Соотношение между поглощенной мощностью и полезной мощностью - это, как вы знаете, производительность. Он поглощает ток 18 А с коэффициентом мощности 0, мы знаем, что сопротивление фазы статора равно 1, 5 . Потери в меди в роторсоне, равные потерям статора и потери в железе плюс механические, составляют половину делькобра в статоре. Процедуры, которые используются при запуске, классифицируются в зависимости от типа двигателя, то есть, если двигатель имеет ротор в коротком замыкании или на ране ротора. Прямой запуск трехфазного двигателя. Ток уменьшается в релятивистской зависимости, в которой напряжение уменьшается, а пара в квадратичном отношении. Начните звездообразный треугольник. В момент установления соединения двигателя с сетью в нем производится звездообразное соединение, поэтому обмотка двигателя подвергается напряжению. Когда двигатель достигает определенной скорости вращения, он соединяется в треугольник, к двигателю - сетевое напряжение. Связь между стартовой парой в треугольнике и стартовой парой может быть выведена из выражения: Связь между интенсивностью в треугольнике и интенсивностью в звезде также может быть выведена следующим образом: из предыдущих выражений мы быстро приходим к выводу: характеристика крутящего момента как функция скорости и характерной интенсивности в зависимости от скорости, в треугольнике звездной звезды показана на рисунке Характеристический крутящий момент и интенсивность в зависимости от стартовой скорости звезды-треугольника Начало автотрансформатора: он использует автотрансформатор для уменьшения при запуске. Когда двигатель разгоняется, прикладывается большее напряжение. Ввод в действие статорными резисторами: заключается в интеркалировании в каждой фазе двигателя сопротивления, которое уменьшается по мере того, как двигатель получает скорость. Электронный стартер: электронные пускатели относятся к группе силовой электроники. Они состоят из двух антипараллельных тиристоров, собранных по фазе с каждой из статорных бобин. Схема электронного стартера. Одним из процессов, которые выполняются в этом типе старта, является начало прогрессивного нарастания напряжения. Уменьшая напряжение на клеммах двигателя, ускоряющий момент уменьшается и двигатель начинает плавно. По этой причине этот тип стартера также называется плавным пускателем. Ввод в эксплуатацию электродвигателей роторного двигателя. Двигатели намотки ротора запускаются путем интеркалирования нескольких групп резисторов в цепи ротора, так что двигатель запускается со всем интеркалированным сопротивлением. Когда двигатель получает обороты, группы резисторов устраняются до достижения номинальной скорости. Запуск двигателя обмоточного ротора. В этом типе запуска, помимо уменьшения тока, который поглощает двигатель во время старта, всегда можно работать с максимальным крутящим моментом. Для этого необходимо правильно выбрать значение резисторов ротора. До недавнего времени регулирование скорости двигателей переменного тока было реальной проблемой, оно ограничивалось традиционными методами. Напомним, что скорость ротора асинхронного двигателя выведена из выражения: это означает, что скорость двигателя можно контролировать двумя способами: изменение скорости синхронности, т.е. изменение количества пар полюсов и изменение частоты. Изменение проскальзывания, изменение характеристики, то есть изменение приложенного напряжения на двигатель. Давайте рассмотрим некоторые из этих методов. Это один из методов, используемых в течение многих лет, и это контроль с помощью прыжков. Это можно сделать только в двигателях с короткозамкнутым ротором, так как количество полюсов статора и дельтотрона должно быть одинаковым, и эти двигатели автоматически адаптируются. На рисунке 61 показано наиболее характерное соединение, называемое треугольной двойной звездой. В треугольном соединении число полюсов двигателя максимально велико и соответствует медленной скорости. В двойном звездном соединении число полюсов является наименьшим и соответствует самой высокой скорости. Контроль изменения частоты В течение многих лет этот метод оказался очень проблематичным. Сегодня, благодаря разработке полупроводниковых электронных компонентов, асинхронный двигатель может управляться электронным путем путем изменения частоты подачи питания. Для правильной работы этих двигателей необходимо работать при постоянном крутящем моменте, поэтому изменение частоты должно приводить к уменьшению напряжения. Регулирование скорости, действующей на приложенное напряжение. Это очень ограниченный метод. Он используется только в небольших асинхронных двигателях. Используемыми системами являются два, регенеративное и динамическое торможение. Регенеративное торможение часто используется в приложениях для вилочных погрузчиков и кранов, чтобы ограничить скорость спуска. Он состоит из двигателя, который будет работать как генератор; для этого достаточно, чтобы статор подключался к сети и приводил к тому, что скорость ротора превышала скорость десинхронизма. Это магнитное поле индуцирует токи в роторе, в то время как ротор удерживается, что создает крутящий момент, противоположный вращению, которое заставляет двигатель тормозить. Однофазные двигатели Во многих промышленных и бытовых применениях трехфазные двигатели не могут использоваться, поскольку электропитание однофазное. По этой причине необходимы однофазные двигатели. Наиболее важными однофазными двигателями являются индукционные и коллекторные двигатели. Однофазные асинхронные двигатели аналогичны трехфазным конроторам при коротком замыкании. Статор рифленый, и в его канавках есть две обмотки. Первая - основная или рабочая обмотка и занимает две трети от общего количества слотов. Вторая - вспомогательная или стартовая обмотка, занимающая третью часть оставшихся слотов, и, как видно из ее названия, мы будем использовать ее, чтобы помочь запустить двигатель. Применяя однофазный переменный ток к основной обмотке, в пространстве создается переменное поле неподвижной оси, которое можно рассматривать как сумму двух вращающихся полей, амплитуда которых равна половине и противоположным направлениям, которые приводят к тому, что двигатель не может начать только один На рис. 63 мы видим на характерной скорости пар скорость пускового момента равна нулю. Кривая крутящего момента однофазного переменного тока. Если мы можем обеспечить крутящий момент для какой-либо системы, двигатель начнет вращаться в направлении вращения. В принципе, в двухфазных двигателях используются два очень похожих метода для запуска двигателя. Первый способ заключается в том, чтобы выставить вспомогательную обмотку из фазы в электрическом пространстве 90 ° относительно основного. Кроме того, электрические характеристики этой обмотки - это разные крылья основной обмотки, и это приводит к тому, что токи не соответствуют фазе. На рисунке 64 показана диаграмма соединений, а также векторная диаграмма напряжения и токов. Схема подключения и векторная диаграмма однофазного однофазного двигателя. Эти два тока, более или менее вне фазы, создают вращающееся магнитное поле, которое заставляет двигатель запускаться. Второй метод основан на подключении конденсатора последовательно со вспомогательной обмоткой. Таким образом, возможно, что токи почти 90 ° не соответствуют фазе, так что пусковой крутящий момент будет выше. В этом типе двигателя, называемом запуском конденсатора, как и в предыдущем, называется разделенной фазой, центробежный выключатель обычно помещается во вспомогательную цепь, так что он открывается, когда двигатель достигает нескольких оборотов, близких к двигателю, Электрическая схема и векторная диаграмма однофазного электродвигателя стартера конденсатора. Таким образом, мы имеем только сопротивление. Только устраняя сопротивление электрических проводников нашего дома, мы сэкономили бы более 15% световой купюры. Это теоретически возможно с помощью сверхпроводимости, но материалы, способные к достижению этого явления, требуют очень низких температур, которые могут быть приняты только с помощью криогенных жидкостей, таких как жидкий гелий. Использование этого типа материалов само по себе обошлось бы в этом процессе, поэтому сверхпроводимость в данном случае экономически не компенсирует нас. Сверхпроводники при определенной температуре не только способны нести электрическую энергию без каких-либо потерь, но также обладают свойством отклонения линий магнитного поля, которое известно как «эффект Мейсснера». Таким образом, если мы присоединяем магнит к сверхпроводнику, он генерирует магнитную силу отталкивания, способную противодействовать весу магнита, тем самым заставляя его избегать. Примером использования магнитной левитации являются поезда. Они используют «магнитные волны» для подвеса над рельсом и движутся вдоль рельса. Суспензия будет основана на сверхпроводнике, который будет отклонять линии магнитного поля, чтобы они не проходили внутрь. При движении вагон индуцирует ток в катушках, которые будут действовать как электромагниты, а при их взаимодействии со сверхпроводниками, расположенными на дне вагона, произойдет левитация. Напряженный ток будет увеличиваться со скоростью и, следовательно, с магнитным полем, так что необходимы вспомогательные колеса, которые действуют до момента, когда автомобиль сможет полностью левитировать.
- Трехфазные двигатели переменного тока.
- В этих слотах вводится трехфазная обмотка.
Различают следующие режимы работы асинхронных машин:
- Режим двигателя;
- Режим генератора;
- Режим электромагнитного тормоза;
- Режим динамического торможения;
Режим двигателя
Асинхронные двигатели стали очень популярна и наиболее часто применяемая в электроприводах. Режим электродвигателя применяется для приведения во вращение различные устройства, механизмы, насосы, лебедки, редуктора и т.д. путем преобразования электрической энергии в механическую. Как уже многим известно, что её принцип действия объясняется взаимодействием двух магнитных полей статора и ротора. Магнитное поле статора создается системой трехфазных обмоток и магнитопровода, расположенных непосредственно на статоре (корпусе асинхронной машины). Это поля является вращающимся, так как в трех фазной цепи, ток протекает из фазы А в фазу В, из фазы В в фазу С, а из фазы С обратно в фазу А. Обмотки каждой фазы располагают на статоре так, что бы равномерно заполнить всю окружность, т.е. окружность занимает 360 градусов, имея три обмотки, делим 360/3 получаем 120 градусов на каждую обмотку.

Это вращающееся магнитное поле пронизывая ротор, индуцирует в нем ЭДС, так как ротор короткозамкнутый, то по нему протекает ток. Протекание тока вызывает образование у ротора собственного магнитного поля. Поле статора, которое вращается с скоростью n1 взаимодействует с полем ротора, которое является неподвижным, и старается остановить, затормозить поле статора. Так как ротор закреплен на подшипниках, он способен свободно вращаться вокруг своей оси. Получается, что магнитное поля статора притягивает поле ротора, увлекает его за собой с определенной силой, в результате чего и сам ротор начинает вращаться.
Особенностью этого режима является то, что скорость вращения магнитного поля статора и скорость вращения ротора не должны быть равными, тем более, скорость ротора всегда меньше. Если же каким-либо образом их скорости будут равными, то исходя из явления электромагнитной индукции, обязательна разность магнитного потока, пересекающего тот или иной контур, что и обеспечивается отставанием ротора от магнитного поля статора. Если же все-таки их скорости сравняются, по короткозамкнутой обмотке ротора перестанет протекать электрический ток, исчернит его магнитное поле и ротор не будит увлекаться полем статора. Скольжение в режиме электродвигателя должно быть положительным числом и не равным нулю.
Стоит добавить, что режим двигателя у асинхронных машин является самым часто используемым.
Режим генератора
Режим генератора у асинхронных машин является полной противоположностью режиму двигателя. Самым главным отличием является то, что при режиме двигателя, асинхронная машина потребляет из сети электрическую энергию. А в режиме генератора наоборот отдает в сеть выработанную электрическую энергию.
Режим генератора возможен только тогда, когда скорость вращения ротора n будет выше скорости вращающегося магнитного поля статора. В этом случаи скольжение S будит отрицательным. Для этого необходимо ускорить ротор синхронной машины, то есть посадить на вал ротора, какой-либо механизм (турбина, редуктор, другой двигатель).

Допустим ротор мы разогнали до 3500 оборотов в минуту, а скорость магнитного поля статора 3000 оборотов в минуту, определим скольжение:
Режим генератора у асинхронных машин не является часто используемым, и может применяться в узких специализированных областях, в маломощных электростанциях.
Стоит отметить, что при таком режиме работы, отдаваемая в сеть электроэнергия совпадает по частоте с частотой самой сети. Так как она зависит только от частоты вращения магнитного поля статора, которая как мы знаем не изменяется.
В использовании таких генераторов есть огромный плюс, в его устройстве отсутствуют скользящие контакты, вращающиеся обмотки, это обеспечивает надежную и долговременную эксплуатацию. Так же эти генераторы мало восприимчивы к коротким замыканиям в сети. Еще не маловажным условием работы является, наличие остаточной намагниченности ротора, которое усиливается конденсаторными установками, включенными в цепи статорных обмоток.
Режим электромагнитного торможения
Режим электромагнитного торможения является еще более специфичными специализированным. Вся суть этого режима в том, что если вращение ротора асинхронной машины не совпадает с направлением вращения магнитного поля статора, то ротор будит затормаживаться под действием этого магнитного поля статора. Такой режим возможен только при асинхронной машины, так как путем переключения двух фаз достигается изменение направления вращения магнитного поля статора, и используется в различных грузоподъемных и транспортировочных устройствах. Этот режим часто называют режимом торможения противотоком или противовключением. При таком режиме, если нам необходимо остановить двигатель, при полной остановке, статор необходимо отключить от сети, так как вал начнет вращаться в обратном направлении.
Режим динамического торможения
В таком режиме, асинхронная машина отключается от трех фазной сети, и на обмотки статора подается постоянный ток. Таким образом на статоре образуется постоянное магнитное поле (постоянный магнит), которое тормозит ротор двигателя.
Все выше представленные режимы работы асинхронных машин, кроме режима двигателя, являются специализированными, и используются только в определенных установках, устройствах, станках и т.д.
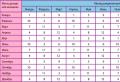
Асинхронные двигатели широко применяются в промышленности. Эти двигатели состоят из двух основных частей: неподвижной – статора и вращающейся – ротора. В асинхронном двигателе переменный трехфазный ток включается в обмотку статора, состоящую из трех самостоятельных частей. Как видно из графика изменений трехфазного тока напряжение достигает максимального значения не одновременно во всех трех фазах, а попеременно, через равные промежутки времени, то в одной, то в другой, то в третьей фазе. Следователь но, если включить такой ток в три обмотки, расположенные так, как это показано на рисунке:
Максимальное значение магнитного потока будет создаваться то в первой, то во второй, то в третьей обмотке, соответственно максимальным значениям тока в фазах, подключенных к этим обмоткам. Магнитное поле, перемещающееся таким образом по замкнутому кругу, называется вращающимся магнитным полем.
Описанное создание вращающегося магнитного поля поясняется рис. Если подключить фазу к первой катушке обмотки двигателя, фазу 2 ко второй катушке, а фазу 3 к третьей катушке обмотки, то в момент времени t 1 максимальный поток будет в первой катушке, так как в это время сила тока в фазе 1, подключенной к первой катушке, будет иметь максимальное значение. Затем сила тока в фазе 1 постепенно ослабевает и, переходя через нуль, меняет направление, в это время увеличивается значение силы тока в фазе 2 и к моменту времени t 2 сила тока в фазе 2 достигает максимального значения, поэтому максимальный поток уже создастся не первой катушкой, а второй. Это в свою очередь означает, что магнитное поле повернулось на 120°. К моменту времени t 3 максимум тока будет в фазе 3, а максимум потока будет создаваться третьей катушкой - магнитное поле повернулось еще на 120º.
К моменту времени t 4 создается такая же картина поля, как и в момент времени t 1, т. е. снова максимума ток достигает в фазе 1, а максимальный магнитный поток создается первой катушкой Это значит, что за время t 1 - t 2 магнитное поле повернулось на 360° (совершило полный оборот).
Обмотка ротора асинхронного двигателя замкнута на себя, или на сопротивление. При неподвижном роторе и наличии тока в обмотке статора силовые линии вращающегося магнитного ноля пересекают неподвижные витки обмотки ротора, в результате чего в обмотке ротора появляется ЭДС и ток. Этот ток, взаимодействуя с полем статора, создает вращающий момент, стремящийся повернуть ротор в сторону вращения поля. Ротор двигателя начнет вращаться. По мере увеличения скорости ротора уменьшаются число пересекаемых силовых линий и ЭДС и, следовательно, ток ротора асинхронного двигателя. Однако ротор никогда не достигает скорости поля, а всегда вращается. Это отставание ротора от ноля статора называют скольжением. Чем больше нагрузка на валу двигателя, тем больше скольжение. Выражается скольжение в процентах или в относительных единицах.
Обычно асинхронные двигатели имеют при полной нагрузке скольжение 2-4%.
Скорость вращения ротора асинхронного двигателя определяется по формуле:

где n-скорость вращения ротора, об/мин;
f - частота питающей сети;
p- число пар полюсов;
s - скольжение.
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ .
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу – F эм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора n 2 будет всегда меньше синхронной частоты n 1 т.е. ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой п 2 равной частоте вращающегося поля статора n 1 . В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно с полем статора. Разность между частотами поля статора n 2 и ротора n 1 называется частотой скольжения Δn:
Отношение частоты скольжения к частоте поля называется скольжением:
![]()
 В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение S H обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение S H обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора - вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится не изменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя - потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается. ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном двигателе. Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δn. Она же наводит в обмотке ротора ЭДС Е 2 , частота которой f 2 связана со скольжением S:

Учитывая, что fi=pn 1 /60, f 2 =pn 1 S/60.
Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при ^=50 Гц).