Une approche pour justifier les caractéristiques probabilistes des moyens de détection périmétrique. Liste de thèses recommandées pour le calcul du coût du système de détection de sécurité
Calcul de la probabilité de détecter un intrus
Après avoir calculé la période des fausses alarmes, il est nécessaire de calculer la probabilité de détecter un CO ASO.
Quel que soit l'algorithme de traitement de l'information et le nombre de sites de détection dans chaque limite, sous forme générale (pour SLOS m sur n), la formule de calcul de la probabilité de détection d'un logiciel prendra la forme :
où k est le nombre ordinal du terme somme, en considérant le premier comme étant nul, ;
Nombre de combinaisons de k+1 éléments par k ;
Probabilité de détecter la i-line ;
La somme de tous les produits possibles des probabilités de détection à partir de n-terminaux par n+k facteurs, le nombre de membres de l'ensemble est égal au membre des combinaisons de n éléments n-m-k. Dans le cas où le logiciel comprend 3 lignes de détection, lorsque l'intrus vient à bout du logiciel, différentes valeurs de probabilités de détection sont possibles, en fonction du SLOS sélectionné.
Chambre1

Chambre 2
Option 2
Chambre 1
Chambre 2
Option 3
Chambre 1




Salle2

D'après les résultats obtenus, il est clair que ce n'est qu'en utilisant SLOS 2:3 et 3:4 dans toutes les options d'aménagement TSO sélectionnées pour les locaux que la valeur requise de probabilité de détection d'un intrus est atteinte.
Détermination de l'algorithme optimal de traitement de l'information
Après avoir reçu un système d'information à un coût minimum, il est nécessaire de déterminer la probabilité de détection d'un intrus et la période de fausses alarmes. La période de fausses alarmes est une caractéristique temporaire du CO. Il est étroitement lié à l'algorithme de traitement de l'information, qui permet de déterminer l'algorithme optimal de traitement du signal.
Actuellement, deux algorithmes SLOS sont largement utilisés, à savoir :
a) Algorithme A - consistant dans le fait qu'après la première activation de l'un des GRT, m-1 autres signaux sont reçus des n-1 GRT restants au fil du temps, et lors de leur réception, le sous-système de détection génère un signal d'alarme. Si le nombre spécifié de signaux n'est pas reçu dans le délai imparti, le signal est réinitialisé et tout est répété depuis le début.
b) Algorithme B - consistant dans le fait qu'après la première opération, un signal est reçu de l'un des m-1 moyens de détection techniques restants pendant un certain temps. Lorsqu'un deuxième signal est reçu, toujours dans un certain laps de temps, un signal est reçu de l'un des m-2 GRT restants, etc. Jusqu'à ce que m alarmes soient reçues et que le signal d'alarme CO soit généré. Si, au cours du processus de saisie des informations, au moins une fois pendant une période donnée, aucun signal du GRT n'est reçu, les informations sont réinitialisées et le processus est répété.
Notez que les valeurs numériques et peuvent être liées par la relation :
Calcul de la période de fausse alarme
Nous calculerons la période de fausses alarmes à l'aide de la formule de l'algorithme B, puisque c'est cet algorithme qui est le plus résistant aux fausses alarmes (de préférence). Cette dépendance a la forme suivante :

où est la période de fausses alarmes avec l'algorithme B ;
k - nombre de sections GRT dans chaque limite ;
n est le nombre de jalons dans le SO ;
nombre m de signaux TCO pour générer un signal d'activation de logiciel ;
Temps de traitement du signal logique avec l'algorithme B ; (750 ms)
La somme de tous les produits possibles des périodes de fausses alarmes du GRT, diverses limites avec n-m facteurs dans chacune.
Option 1
Salle 1.
Salle 2.
Option 2
Salle 1.
Salle 2.
Option 3
Salle 1.
Salle 2.
Sur la base des données obtenues, j'ai choisi SLOS 2:4 car il fournit des valeurs maximales pour la probabilité de détecter un intrus et la période de fausse alarme est plus élevée que requise.
Lors du calcul des périodes de LT des locaux internes, il est nécessaire de tenir compte du fait que les détecteurs qui y sont installés ne fonctionnent généralement pas 24 heures sur 24, mais seulement une partie d'entre eux. Cette comptabilisation peut être effectuée via le facteur de charge, qui représente le rapport entre la durée de fonctionnement du détecteur pendant la semaine et 168 heures (le nombre d'heures par semaine). Pour les locaux qui ne sont pas ouverts régulièrement, pour les locaux avec travail en une seule équipe, pour les locaux avec travail en deux équipes et pour les locaux avec travail en trois équipes (24 heures sur 24) (en raison de deux jours de congé).
Option 1:
Chambre 1
Chambre 2
Option 2
Chambre 1
Chambre 2
Option 3
Chambre 1
Chambre 2
Calcul du coût du système de détection de sécurité
La longueur de la zone de détection (Loobn) affecte de manière significative le coût du logiciel, et le degré d'influence est déterminé par la relation :

Bonjour, chers lecteurs et critiques de Habra. Je voudrais consacrer cet article à un sujet aussi d'actualité que la détection d'objets dans les images.
En tant qu'algorithme pour une telle détection, pensez à choisir un seuil rapide et efficace La méthode d'Otsu.
Introduction
Alors commençons dans l'ordre. En général, la tâche de la détection d'objets est de déterminer la présence d'un objet dans une image présentant certaines caractéristiques spécifiques.Une telle caractéristique pourrait être par exemple la luminosité. L'un des moyens les plus simples et les plus naturels de détecter un ou plusieurs objets consiste à sélectionner un seuil de luminosité, ou classification de seuil (seuil). Le but d'un tel seuil est de diviser l'image en un objet clair (premier plan) et un fond sombre (arrière-plan). Ceux. un objet est une collection de pixels dont la luminosité dépasse un seuil ( je > T), et l'arrière-plan est la collection de pixels restants dont la luminosité est inférieure au seuil ( je < T).
Le paramètre clé est donc le seuil T. Comment le choisir ?
Il existe des dizaines de méthodes pour choisir un seuil. Une méthode rapide et efficace est celle inventée par le scientifique japonais Nobuyuki Otsu en 1979. C'est ce dont nous parlerons plus loin.
Méthode Otsu
Soit une image 8 bits pour laquelle vous devez calculer le seuil T. Dans le cas d'une image 24 bits, elle peut être facilement convertie en 8 bits en utilisant les niveaux de gris :je = 0.2125 R. + 0.7154 g + 0.0721 B
La méthode d'Otsu utilise un histogramme d'image pour calculer le seuil. Permettez-moi de vous rappeler qu'un histogramme est un ensemble de cases, dont chacune caractérise le nombre d'éléments d'échantillon qui y tombent. Dans notre cas, l'échantillon est constitué de pixels de luminosités différentes, qui peut prendre des valeurs entières de 0 à 255.
Exemple d'image avec un objet :
Histogramme de cette image : 
À partir de l’histogramme, une personne peut facilement voir qu’il existe deux classes clairement séparées. L’essence de la méthode d’Otsu est de fixer le seuil entre les classes de manière à ce que chacune d’elles soit aussi « dense » que possible. En termes mathématiques, cela revient à minimiser la variance intraclasse, qui est définie comme la somme pondérée des variances de deux classes : ![]()
Ici w 1 et w 2 - probabilités des première et deuxième classes, respectivement.
Dans ses travaux, Otsu montre que minimiser la variance intraclasse équivaut à maximiser entre variance de classe, qui est égale à : ![]()
Dans cette formule un 1 et un 2 - moyennes arithmétiques pour chaque classe.
La particularité de cette formule est que w 1 (t + 1), w 2 (t + 1), un 1 (t + 1), un 2 (t+ 1) s'expriment facilement à travers les valeurs précédentes w 1 (t), w 2 (t), un 1 (t), un 2 (t) (t- seuil de courant). Cette fonctionnalité nous a permis de développer un algorithme rapide :
- Nous calculons l'histogramme (un passage dans le tableau de pixels). Ensuite, vous n’avez besoin que d’un histogramme ; les passages sur toute l’image ne sont plus nécessaires.
- À partir du seuil t= 1, on parcourt tout l'histogramme en recalculant la variance à chaque étape σ b (t). Si à l’une des étapes la variance est supérieure au maximum, alors nous mettons à jour la variance et T = t.
- Le seuil requis est T.
Voici le résultat obtenu en implémentant l'algorithme ci-dessus : 
Seuil calculé : 
Exemple réel
En plus d'un exemple généré artificiellement, j'aimerais également montrer un véritableen utilisant la méthode.
Ma thèse actuelle nécessite de localiser un code barre sur une image : 
Avant d'utiliser la méthode Otsu, vous devez effectuer un prétraitement afin de prendre en compte d'une manière ou d'une autre les caractéristiques structurelles d'un code-barres unidimensionnel. Si vous ne le faites pas, la méthode ne fera tout simplement rien. La particularité de la structure du code-barres est qu'elle est constituée de bandes verticales, et présente donc de grandes dérivées horizontales et de petites dérivées verticales. Par conséquent, si nous prenons l’image comme la différence entre les dérivées horizontale et verticale, puis appliquons un filtre de moyenne, nous obtenons ceci : 
Pas mal, non ? L'image du code-barres est clairement visible dans l'image et se distingue par une luminosité nettement supérieure à celle des objets environnants. Vous pouvez désormais utiliser la méthode Otsu en toute sécurité : 
En conséquence, nous avons reçu un code-barres correctement localisé.
Implémentation en C++
Et bien, comme promis, implémentation du calcul de seuil selon la méthode d'Otsu en C++ avec commentaires :* Ce code source a été mis en évidence avec Source Code Highlighter.
- typedef char non signé imageInt;
- // Détermination du seuil par la méthode d'Otsu
- int otsuThreshold (imageInt *image, taille int)
- // Vérifie NULL et ainsi de suite. baissons-le pour nous concentrer
- // au travail de la méthode
- // Calcule la luminosité minimale et maximale de tous les pixels
- int min = image ;
- int max = image ;
- pour (int je = 1; je< size; i++)
- valeur int = image[i];
- si (valeur< min)
- min = valeur ;
- si (valeur > max)
- maximum = valeur ;
- // L'histogramme sera limité en dessous et au dessus par les valeurs min et max,
- // donc ça ne sert à rien de créer un histogramme de 256 bins
- int histSize = max - min + 1 ;
- int * hist = nouveau int ;
- // Remplit l'histogramme avec des zéros
- pour (int t = 0; t< histSize; t++)
- hist[t] = 0;
- // Et calcule la hauteur des bacs
- pour (int je = 0; je< size; i++)
- hist - min]++;
- // Entrons deux nombres auxiliaires :
- entier m = 0 ; // m - la somme des hauteurs de tous les bacs, multipliée par la position de leur milieu
- entier n = 0 ; // n - la somme des hauteurs de tous les bacs
- pour (int t = 0; t<= max - min; t++)
- m += t * hist[t];
- n += hist[t];
- flotteur maxSigma = -1 ; // Valeur maximale de la variance interclasse
- seuil int = 0 ; // Seuil correspondant à maxSigma
- int alpha1 = 0 ; // Somme des hauteurs de tous les bacs pour la classe 1
- int bêta1 = 0 ; // La somme des hauteurs de tous les bacs de la classe 1, multipliée par la position de leur milieu
- // La variable alpha2 n'est pas nécessaire, car il est égal à m - alpha1
- // La variable beta2 n'est pas nécessaire, car il est égal à n - alpha1
- // t parcourt toutes les valeurs de seuil possibles
- pour (int t = 0; t< max - min; t++)
- alpha1 += t * hist[t];
- bêta1 += hist[t];
- // Calculez la probabilité de la classe 1.
- float w1 = (float) bêta1 / n ;
- // Il n'est pas difficile de deviner que w2 n'est pas non plus nécessaire, car il est égal à 1 - w1
- // a = a1 - a2, où a1, a2 sont des moyennes arithmétiques pour les classes 1 et 2
- float a = (float )alpha1 / beta1 - (float )(m - alpha1) / (n - beta1);
- // Enfin, on calcule sigma
- float sigma = w1 * (1 - w1) * a * a;
- // Si sigma est supérieur au maximum actuel, alors mettez à jour maxSigma et le seuil
- si (sigma > maxSigma)
- maxSigma = sigma ;
- seuil = t ;
- // N'oublions pas que le seuil a été compté à partir de min et non à partir de zéro
- seuil += min ;
- // Ça y est, le seuil a été calculé, remets-le en haut :)
- seuil de retour ;
Conclusion
Nous avons donc examiné l'utilisation de la méthode d'Otsu pour détecter des objets dans les images. Les avantages de cette méthode sont :- Facilité de mise en œuvre.
- La méthode s'adapte bien à différents types d'images, en choisissant le seuil le plus optimal.
- Délai d'exécution rapide. Requis Ô(N) opérations où N- le nombre de pixels dans l'image.
- La méthode n’a pas de paramètres, il suffit de la prendre et de l’appliquer. Dans MatLab, il s'agit de la fonction graythresh() sans arguments (Pourquoi ai-je donné un exemple de MatLab ? C'est juste que cet outil est le standard de facto pour le traitement d'image).
- La binarisation du seuil elle-même est sensible à la luminosité inégale de l'image. Une solution à ce problème pourrait être l’introduction de seuils locaux plutôt que mondiaux.
Sources
- Otsu, N., « Une méthode de sélection de seuil à partir d'histogrammes de niveaux de gris », IEEE Transactions on Systems, Man, and Cybernetics, Vol. 9, non. 1, 1979, p. 62-66.
La très grande majorité des menaces à la sécurité des installations de sécurité étendues sont détectées à l'aide de moyens techniques de détection de type périmétrique inclus dans le système d'alarme de sécurité des installations. Divers phénomènes naturels et industriels (vent fort, interférences électromagnétiques provenant d'équipements radio-électroniques, etc.), d'objets vivants (animaux, oiseaux), affectant les moyens de détection, entraînent des interférences qui provoquent de fausses alarmes.
Les principales caractéristiques des moyens de détection sont la probabilité de détecter un intrus P ob et le délai moyen jusqu'à fausse alarme T lt. Lors du développement d'outils de détection, les exigences de probabilité de détection d'une menace de sécurité (intrus), en fonction de l'importance des tâches à résoudre, sont normalisées dans les limites suivantes :
a) niveau satisfaisant (P environ > 0,9) ;
b) niveau élevé (P environ > 0,95) ;
c) niveau très élevé (P environ > 0,97).
Le taux de fausses alarmes est déterminé par le fabricant sur la base des résultats de tests à long terme des dispositifs de détection dans diverses conditions. Dans ce cas, le délai acceptable entre fausses alarmes peut être considéré comme étant T lt > 720 heures. La valeur obtenue lors des tests est indiquée par le fabricant dans le passeport produit. Dans ce cas, les tests sont effectués dans le cadre des spécifications techniques approuvées. La possibilité de varier les conditions de test réelles permet au fabricant d'équipement de détection de surestimer la caractéristique T lt pour des raisons opportunistes. Cependant, les statistiques sur l'utilisation de moyens de détection périmétrique sur des sites spécifiques permettent de déterminer des estimations assez claires de l'immunité au bruit d'un appareil particulier.
Une estimation fiable de la probabilité de détecter un intrus dépend en grande partie du modèle d’intrus sélectionné. Par exemple, un intrus est souvent compris comme une personne moyenne traversant la zone de sécurité à pied, de manière monotone, à une vitesse de 0,3 à 5 m/s. Si le véritable intrus se déplace à faible vitesse (inférieure à 0,2 m/s), la probabilité de détection diminuera jusqu’à zéro, en fonction de l’état de préparation de l’intrus.
Considérons les caractéristiques des outils de détection périmétrique dans le cadre du modèle statistique de l'intrus. Son modèle généralisé détermine la fréquence d'apparition de divers contrevenants à la ligne de sécurité, divisés en types selon leur niveau de préparation. Chaque type i = 1, 2... peut être associé à la probabilité de sa détection P autour de i par un outil de détection donné et au degré de dommage potentiel k i = 1, 2.. que de tels contrevenants peuvent causer à l'objet protégé. La probabilité intégrale de détecter une menace envers un objet inclut ces caractéristiques particulières. Le degré de sensibilisation des contrevenants au système de sécurité périmétrique varie - de l'ignorance ou une certaine familiarité à une connaissance et une formation complètes dans les zones de passage à niveau. Selon le niveau de sensibilisation, 4 types de contrevenants peuvent être distingués.
Le premier concerne les contrevenants involontaires (accidentels). En règle générale, ils sont détectés de manière fiable conformément au scénario standard de leur action, intégré dans l'algorithme de traitement de l'information de l'outil de détection. Ce n'est que pour ces contrevenants que la probabilité de détection prévue dans le passeport produit (moyens de détection) est garantie. Ils constituent le type de délinquant le plus courant.
Le deuxième type de contrevenant se distingue par le fait que les personnes tentent délibérément de contourner le système de sécurité de l’établissement. Ils ont une certaine compréhension des alarmes de sécurité installées, ont lu quelque chose dans la littérature technique et tentent de réduire la probabilité de détection. Par exemple, réduisez ou augmentez la vitesse de déplacement, utilisez les moyens disponibles pour franchir la clôture. De tels intrus délibérés non qualifiés qui ne connaissent pas le principe physique de détection sont généralement détectés de manière satisfaisante par des moyens de détection périmétrique. Le nombre de ces contrevenants est en moyenne 2 fois inférieur à celui des contrevenants aléatoires, cependant, il existe des objets (par exemple, loin des limites de la ville) où ils prédominent.
Le troisième type représente les contrevenants délibérés et habiles qui connaissent bien le système de sécurité. En règle générale, les délinquants isolés disposent de moyens spéciaux pour franchir plus facilement une limite (par exemple, un escabeau, une échelle de corde, etc.) ou même pour contourner les moyens de détection, par exemple en creusant. Un groupe de contrevenants peut s’entraider pour franchir la zone de sécurité. Leur composition en pourcentage est faible, mais souvent la menace maximale pour un objet peut leur être associée.
Le dernier type est un délinquant délibéré et hautement qualifié. La détection à périmètre unique signifie une détection extrêmement insatisfaisante. Une véritable détection de tels intrus est possible en combinant la ligne de sécurité avec deux ou trois moyens de détection de principes physiques de fonctionnement différents.
Les valeurs typiques des probabilités de détection pour différents types d'intrus conformément à la classification proposée sont données dans le tableau 1.
Probabilité de détection pour différents types d'intrus de détection périmétrique
Tableau 1
La probabilité de détecter des objets de forme géométrique simple sur un fond uniforme en présence de bruit aléatoire a été considérée au Chap. 4. Les conclusions tirées de cette considération sont que le système visuel fonctionne en calculant le rapport signal sur bruit et en le comparant à un rapport signal sur bruit seuil comme critère d'importance du signal reçu. Il existe une quantité importante de données pour étayer cette théorie dans diverses conditions d’observation. Dans des conditions de visibilité limitée par bruit quantique ou contraste, la théorie est confirmée par les données de Blackwell, et en présence de bruit additif - par les données de Coltman et Anderson, Schade, ainsi que Rozelle et Wilson, réalisées avec des objets réels sous conditions naturelles, ont montré que le pourcentage d'objets détectés augmente en fait avec l'augmentation du contraste. Bernstein, par exemple, a déterminé que les images sur un écran à tube cathodique de voitures et de personnes devraient avoir un contraste CJL (LT - LB)/L de 90 % pour garantir la probabilité de discrimination la plus élevée possible.
De plus, Bernstein a établi que la résolution n’affecte la probabilité de détection que dans la mesure où elle modifie le rapport signal/bruit ou le contraste de l’objet. Cependant, Coluccio et al.)
Articles Similaires:
 Comment réaliser un plafond tendu flottant de vos propres mains ?
Comment réaliser un plafond tendu flottant de vos propres mains ?
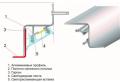 Plafond en plaques de plâtre DIY : plafond flottant à un seul niveau sur tiges Outils et matériaux nécessaires
Plafond en plaques de plâtre DIY : plafond flottant à un seul niveau sur tiges Outils et matériaux nécessaires
 Maison coulée en scories et ciment
Maison coulée en scories et ciment
 Méthodes d'installation des portes d'entrée et intérieures en béton cellulaire Comment renforcer une ouverture dans un mur en béton cellulaire
Méthodes d'installation des portes d'entrée et intérieures en béton cellulaire Comment renforcer une ouverture dans un mur en béton cellulaire
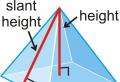 Trouver l'aire d'une pyramide triangulaire régulière
Trouver l'aire d'une pyramide triangulaire régulière





