Moteur asynchrone monophasé avec bobinage de démarrage. Le dispositif et le principe de fonctionnement d'un moteur asynchrone. Type de moteur asynchrone : principe de fonctionnement, description et fonctions
Comme indiqué, moteurs asynchrones monophasésà l'heure actuelle, elles sont réalisées principalement sous forme de petites machines avec des capacités dépassant rarement 0,5 kW.
Leur stator a un enroulement monophasé, qui est généralement obtenu à partir d'un triphasé, connecté à une étoile, n'utilisant que deux de ses phases. Le rotor est fourni avec un enroulement court-circuité en forme de cage d'écureuil.
Si l'enroulement du stator est alimenté par un courant alternatif monophasé, il créera un n.s. alternatif (pulsé). Lorsque le rotor est à l'arrêt, un champ alternatif (pulsé) apparaît dans la machine. Il induira des courants dans l'enroulement du rotor, comme dans l'enroulement secondaire d'un transformateur. La figure 2.21 montre les directions des courants dans les conducteurs d'un rotor à cage d'écureuil en présence d'un champ pulsatoire.
Riz. 2.21. Courants dans les conducteurs de l'enroulement du rotor d'un moteur monophasé à rotor fixe
De toute évidence, le couple résultant agissant sur le rotor sera égal à zéro, car les forces électromagnétiques résultant de l'interaction du champ et des courants dans l'enroulement du rotor sur ses moitiés droite et gauche seront égales et opposées.
Le manque de couple de démarrage est caractéristique moteur monophasé avec le schéma de connexion spécifié. Par conséquent, lui-même ne peut pas bouger. Cependant, si vous faites tourner le rotor au moyen d'une force externe, le moteur tournera indépendamment à l'avenir et pourra être chargé.
Des phénomènes similaires peuvent être observés avec un moteur triphasé lors de la rupture d'un des fils d'alimentation. Si le fil est coupé sur un moteur à l'arrêt, il ne créera pas de couple au démarrage et ne bougera pas. Si le fil est coupé sur un moteur triphasé en rotation, ce dernier continuera à fonctionner en monophasé. Mais sa puissance dans ce cas devrait être réduite à 50 ... 55% du nominal.
Le mode de fonctionnement d'un moteur triphasé en tant que moteur monophasé ne peut pas être autorisé lorsque la puissance sur son arbre est proche de la valeur nominale, car ses enroulements en raison de l'augmentation des courants en eux dans ce mode pour un temps limité devenir excessivement chaud.
Pour expliquer ces phénomènes, nous remplaçons la variable pulsant le long d'un axe du n.s. stator par deux n.s. tournant dans des directions différentes avec une fréquence synchrone et ayant des amplitudes égales à la moitié de l'amplitude de la pulsation n.s.
Avec un rotor stationnaire, les deux n.s. avec des amplitudes égales tournent par rapport au rotor avec la même fréquence synchrone. Les champs provoqués par eux auront également les mêmes amplitudes. Ils vont induire les mêmes courants dans l'enroulement du rotor. Par conséquent, les couples résultant de l'interaction des champs et des courants induits par ceux-ci seront égaux les uns aux autres. Comme ils agissent dans des directions opposées, le couple résultant est nul. Par conséquent, le rotor ne peut pas commencer à tourner de lui-même. Si, comme indiqué, de quelque manière que ce soit pour l'amener en rotation dans n'importe quelle direction, alors dans cette direction, il tournera indépendamment et atteindra une vitesse proche de la synchrone.
Le champ qui tourne dans le même sens que le rotor est appelé directement tournant ou direct, l'autre champ - tournant inverse ou inverse. Lorsque le rotor tourne, ces deux champs ne sont pas les mêmes : le champ inverse est affaibli, tandis que le champ directement tournant est renforcé. A une vitesse de rotation proche de la synchrone, le champ inverse est tellement affaibli que le champ résultant devient presque circulaire.
L'affaiblissement du champ inverse lorsqu'un moteur monophasé fonctionne s'explique comme suit. Si le rotor est relativement champ direct a un glissement s, alors il aura un glissement relatif au champ inverse :
![]()
Par conséquent, les courants induits par le champ inverse dans l'enroulement du rotor auront une fréquence élevée, par exemple, lorsque s = 0,05, elle est égale à (2-s) f 1 = 1,95 · 50 = 97,5 Hz. La résistance inductive de l'enroulement du rotor à cette fréquence sera plusieurs fois supérieure à sa résistance active. Les courants seront presque purement réactifs ; ils auront un fort effet démagnétisant, c'est-à-dire affaiblir le champ inverse.
Ainsi, aux faibles valeurs de glissement, le couple dans les moteurs monophasés est créé principalement en raison de l'interaction du champ continu et des courants induits par celui-ci dans l'enroulement du rotor. Le couple de freinage issu de l'interaction du champ inverse, fortement affaibli, et des courants induits par celui-ci dans l'enroulement rotorique (presque purement réactif) est de peu de valeur.
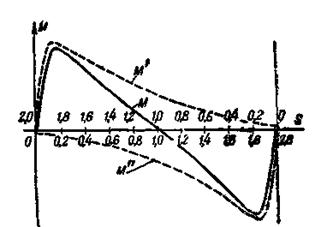
Riz. 2.22. Courbes de couple moteur monophasé
Le courant dans le rotor d'un moteur monophasé étant formé par la superposition de deux courants de fréquences très différentes, les pertes électriques dans le rotor peuvent être considérées comme égales à la somme des pertes causées par chacun des courants séparément. Par conséquent, les pertes électriques dans le rotor d'un moteur monophasé sont approximativement deux fois les mêmes pertes dans le rotor d'un moteur triphasé de la puissance correspondante. Il s'agit de moteurs avec une telle conception de l'enroulement du rotor, dans lesquels on peut ignorer le déplacement du courant dans ses conducteurs. Si les moteurs ont des rainures profondes ou une double cage sur le rotor, les pertes de courants induites par le champ inverse dans les conducteurs de l'enroulement du rotor augmentent considérablement en raison du déplacement du courant dans ceux-ci.
De plus, le cos d'un moteur monophasé est inférieur à celui d'un moteur triphasé, puisque le premier a un courant à vide plus élevé (du fait de sa composante réactive). Ce dernier deviendra clair si l'on considère le fonctionnement d'un moteur tournant à une vitesse synchrone avec un enroulement rotorique ouvert et fermé. Dans le premier cas, les deux chercheurs - avant et arrière - créeront les mêmes champs, induisant des champs électromagnétiques dans l'enroulement du stator, équilibrant presque complètement la tension appliquée.
Dans le second cas, l'inverse n.s. créé non seulement par les courants statoriques, mais aussi par les courants rotoriques induits par le champ inverse ; il est, comme le champ inverse, très affaibli. Par conséquent, le n.s. Dans ce cas, le stator doit augmenter de manière à ce que le champ direct créé par celui-ci induise une CEM dans l'enroulement du stator, ce qui équilibre presque complètement la tension appliquée. Dans le second cas, le courant statorique sera presque 2 fois plus élevé que dans le premier cas. Ceci explique l'augmentation du courant à vide d'un moteur monophasé.
Une augmentation du glissement provoque une augmentation du couple de freinage du champ inverse, donc le couple maximum d'un moteur monophasé est inférieur à celui du moteur triphasé correspondant.
Coefficient action utile un moteur monophasé est également plus faible en raison des pertes accrues dans l'enroulement du rotor ainsi que dans l'enroulement du stator en raison d'une détérioration du cos.
Le démarrage d'un moteur monophasé s'effectue généralement lorsqu'il y a une phase auxiliaire sur le stator. a été décalée spatialement de 90 el. grêle, par rapport à n.w. enroulement du stator principal. Le courant de l'enroulement auxiliaire doit être déphasé par rapport au courant de l'enroulement principal. Si les conditions spécifiées sont remplies, les deux enroulements provoqueront un champ magnétique tournant. Il sera asymétrique, mais le couple qu'il crée dans le cas d'un petit couple de freinage sur l'arbre est encore suffisant pour démarrer le moteur. L'enroulement auxiliaire est désactivé lorsque le moteur atteint une vitesse approximativement normale, car il est conçu pour une charge à court terme.
Par conséquent, au démarrage, le moteur fonctionne en biphasé, et à vitesse normale, en monophasé. Pour obtenir un courant dans l'enroulement auxiliaire, déphasé par rapport au courant dans l'enroulement principal, allumer en série avec le premier résistance active(Fig. 2.23, a) ou un conteneur (Fig. 2.23, b).
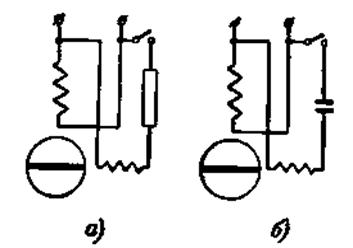
Riz. 2.23. Circuits de démarrage pour moteurs monophasés
L'utilisation d'un condensateur permet un déphasage entre les courants indiqués égal à 90°, ce qui donne une augmentation significative du couple initial.
À la fois, moteurs monophasés, dans laquelle la phase auxiliaire et le condensateur connecté en série avec elle restent allumés pendant tout le fonctionnement du moteur. De tels moteurs à condensateur, par rapport aux moteurs monophasés classiques, fonctionnant avec la phase auxiliaire déconnectée, ont un couple maximum plus élevé et un meilleur rendement et cos.
Domaines d'utilisation. Les moteurs asynchrones de faible puissance (15 - 600 W) sont utilisés dans les appareils automatiques et les appareils électroménagers pour entraîner des ventilateurs, des pompes et d'autres équipements ne nécessitant pas de contrôle de vitesse. Dans les appareils électriques et les appareils automatiques, des micromoteurs monophasés sont généralement utilisés, car ces appareils et appareils sont généralement alimentés par réseau monophasé courant alternatif.
Le principe de fonctionnement et le dispositif d'un moteur monophasé. Enroulement statorique d'un moteur monophasé (Fig. 4.60, une) situé dans des fentes qui occupent environ les deux tiers de la circonférence du stator, ce qui correspond à une paire de pôles. Par conséquent
(voir Ch. 3) la distribution des MDS et de l'induction dans l'entrefer est proche de la sinusoïdale. Depuis que l'enroulement passe courant alternatif, les impulsions MDS sont synchronisées avec la fréquence du réseau. Induction à un point arbitraire dans l'entreferBx = m sin ωt cos (πх / τ).
Ainsi, dans un moteur monophasé, le bobinage du stator génère un flux stationnaire, évoluant dans le temps, plutôt qu'un flux rotatif circulaire, comme dans les moteurs triphasés à alimentation symétrique.
Pour simplifier l'analyse des propriétés d'un moteur monophasé, nous représentons (4.99) sous la forme
In = 0,5W sin (ωt - πх / τ) + 0,5W sin (ωt + πх / τ),.
C'est-à-dire que nous remplaçons le flux pulsatoire stationnaire par la somme de champs circulaires identiques tournant dans des directions opposées et ayant la même vitesse de rotation : m 1pr = m 1obr = m 1 . Étant donné que les propriétés moteur asynchrone lorsqu'un champ tournant circulaire est discuté en détail aux § 4.7 - 4.12, l'analyse des propriétés d'un moteur monophasé peut se réduire à considérer l'action combinée de chacun des champs tournants. En d'autres termes, un moteur monophasé peut être représenté sous la forme de deux moteurs identiques dont les rotors sont rigidement reliés l'un à l'autre (Fig. 4.60, b), avec le sens de rotation opposé des champs magnétiques et le moments créés par eux Mà M arr. Le champ dont le sens de rotation coïncide avec le sens de rotation du rotor est dit direct ; champ de sens inverse - inverse ou inverse.
Supposons que le sens de rotation des rotors coïncide avec le sens de l'un des champs tournants, par exemple avec npr. Puis le glissement du rotor par rapport au débit F N.-É.
sпр = (n1пр - п2) / n1пр = (n1 - п2) / n1 = 1 - n2 / n1..
Glissement du rotor par rapport au débit Fobr
srev = (n1rev + n2) / n1rev = (n1 + n2) / n1 = 1 + n2 / n1..
Il résulte de (4.100) et (4.101) que
so6p = 1 + n2 / n1 = 2 - spr..
Moments électromagnétiques Mà M obr, formé par des champs directs et inverses, sont dirigés dans des directions opposées, et le couple résultant d'un moteur monophasé M cut est égal à la différence de moments à la même vitesse de rotor.
En figue. 4.61 montre la dépendance M = f (s) pour un moteur monophasé. Au vu de la figure, les conclusions suivantes peuvent être tirées :
a) un moteur monophasé n'a pas de couple de démarrage ; il tourne dans le sens où il est entraîné par une force extérieure ; b) la vitesse de rotation d'un moteur monophasé au ralenti est inférieure à celle d'un moteur triphasé, du fait de la présence d'un couple de freinage généré par le champ inverse ;
c) les performances d'un moteur monophasé sont inférieures à celles d'un moteur triphasé ; il a un glissement accru à charge nominale, un rendement inférieur, une capacité de surcharge inférieure, ce qui s'explique également par la présence d'un champ inverse ;
d) la puissance d'un moteur monophasé est d'environ 2/3 de la puissance d'un moteur triphasé de même taille, car dans un moteur monophasé, l'enroulement de travail n'occupe que 2/3 des encoches du stator. Remplir tous les emplacements du stator
comme dans ce cas le coefficient d'enroulement est faible, la consommation de cuivre augmente d'environ 1,5 fois, tandis que la puissance n'augmente que de 12%.Lanceurs. Pour obtenir le couple de démarrage, les moteurs monophasés ont un enroulement de démarrage décalé de 90 degrés électriques par rapport à l'enroulement de travail principal. Pendant la période de démarrage, l'enroulement de démarrage est connecté au réseau par l'intermédiaire d'éléments déphaseurs - capacité ou résistance active. Après la fin de l'accélération du moteur, l'enroulement de démarrage est désactivé, tandis que le moteur continue de fonctionner en monophasé. Comme l'enroulement de démarrage ne fonctionne que pendant une courte période, il est constitué d'un fil de section plus petite que celui de travail et est placé dans un plus petit nombre de fentes.
Considérons en détail le processus de démarrage lors de l'utilisation de la capacité C comme élément de déphasage (Fig. 4.62, a). Sur le bobinage de départ N.-É. Tension
Ú
1p = Ú
1
- Ú
C = Ú
1
+jÍ1 N.-É. XC, c'est-à-dire qu'il est déphasé par rapport à la tension du secteur U 1 attaché à l'enroulement de travail R... Par conséquent, les vecteurs de courants dans le travail je 1p et lanceur je Les enroulements 1n sont déphasés d'un certain angle. En choisissant d'une certaine manière la capacité du condensateur déphaseur, il est possible d'obtenir le mode de fonctionnement au démarrage, proche du symétrique (Fig. 4.62, b), c'est-à-dire d'obtenir un champ tournant circulaire. En figue. 4.62, dans les dépendances sont indiquées M = f (s) pour le moteur avec l'enroulement de démarrage activé (courbe 1) et désactivé (courbe 2). Le moteur est démarré en pièces un B caractéristiques 1; à ce point b l'enroulement de démarrage est désactivé et, à l'avenir, le moteur fonctionne en partie avec caractéristiques 2.
Étant donné que l'inclusion du deuxième enroulement améliore considérablement caractéristique mécanique moteur, dans certains cas des moteurs monophasés sont utilisés, dans lesquels les enroulements A et B
inclus tout le temps (Fig. 4.63, a). De tels moteurs sont appelés moteurs à condensateur.Les deux enroulements des moteurs à condensateur occupent généralement le même numéro rainures et ont la même puissance. Lors du démarrage d'un moteur à condensateur, afin d'augmenter le couple de démarrage, il est conseillé d'avoir une capacité augmentée Cp + Cn. Après avoir accéléré le moteur selon la caractéristique 2 (Fig. 4.63, b) et diminué le courant, une partie des condensateurs Cn est déconnectée afin d'augmenter la résistance capacitive en régime nominal (lorsque le courant moteur devient inférieur à celui au démarrage) et assurer le fonctionnement du moteur dans des conditions proches du fonctionnement à champ tournant circulaire. Dans ce cas, le moteur tourne à la caractéristique 1.
Le moteur à condensateur a un cos φ élevé. Ses inconvénients sont la masse et les dimensions relativement importantes du condensateur, ainsi que l'apparition d'un courant non sinusoïdal avec distorsion de la tension d'alimentation, ce qui entraîne dans certains cas des effets néfastes sur les lignes de communication.
Dans des conditions de démarrage légères (faible couple résistant pendant la période de démarrage), des moteurs avec résistance de démarrage sont utilisés R(Fig. 4.64, a). La présence d'une résistance active dans le circuit d'enroulement de démarrage fournit un déphasage φп plus petit entre la tension et le courant dans cet enroulement (Fig. 4.64, b) que le déphasage φр dans l'enroulement de travail. À cet égard, les courants dans les enroulements de travail et de démarrage s'avèrent déphasés d'un angle φр - φп et forment un champ tournant asymétrique (elliptique), à cause duquel le couple de démarrage apparaît. Les moteurs avec résistance de démarrage fonctionnent de manière fiable et sont fabriqués en série. La résistance de démarrage est intégrée dans le boîtier du moteur et refroidie avec le même air qui refroidit l'ensemble du moteur.
Micromoteurs monophasés à pôles ombragés. Dans ces moteurs, l'enroulement du stator, connecté au réseau, est généralement réalisé concentré et renforcé à des pôles prononcés (Fig. 4.65, a), dont les tôles sont estampées avec le stator. Dans chaque pôle, l'une des bornes est recouverte d'un enroulement auxiliaire, constitué d'une ou plusieurs spires court-circuitées, qui écran de 1/5 à 1/2 de l'arc polaire. Le rotor du moteur est un rotor à cage d'écureuil de type classique.
Le flux magnétique de la machine créé par l'enroulement du stator (flux polaire) peut être représenté comme la somme de deux composantes (Fig. 4.65, b) Фп = Фп1 + Фп2, où Фп1 est le flux traversant la partie du pôle non couvert par une boucle en court-circuit; Фп2 - le flux traversant la partie du pôle, blindée par une spire en court-circuit.
Les flux Фп1 et Фп2 traversent différentes parties de la pièce polaire, c'est-à-dire qu'ils sont déplacés dans l'espace d'un angle . De plus, ils sont déphasés par rapport au MDS. F n enroulement du stator à différents angles - γ1 et γ2. Cela est dû au fait que chaque pôle du moteur décrit peut être considéré en première approximation comme un transformateur dont l'enroulement primaire est l'enroulement du stator et le secondaire est une spire en court-circuit. Le flux de l'enroulement du stator induit une CEM dans une boucle en court-circuit Eà (Fig. 4.65, c), à la suite de laquelle un courant se produit je k et MDS F k, pliage avec MDS F n enroulement statorique. Composante de courant réactif je k réduit le flux 2, et l'actif le déphase par rapport au MDS F NS. Étant donné que le flux Фп1 ne couvre pas la boucle en court-circuit, l'angle γ1 a une valeur relativement faible (4-9 °) - environ la même que l'angle de déphasage entre le flux du transformateur et le MDS de l'enroulement primaire dans mode sans charge. L'angle γ2 est beaucoup plus grand (environ 45°),
c'est-à-dire le même que dans un transformateur avec un enroulement secondaire court-circuité (par exemple, dans transformateur de mesure courant). Ceci est dû au fait que les pertes de puissance, dont dépend l'angle γ2, sont déterminées non seulement par les pertes de puissance magnétique dans l'acier, mais aussi par les pertes électriques dans la boucle en court-circuit.Les flux Фп1 et Фп2, déplacés dans l'espace d'un angle β et déphasés dans le temps d'un angle γ = γ2 - γl, forment un champ magnétique tournant elliptique (voir Ch. 3), qui donne un couple agissant sur le rotor du moteur dans le sens de la première pièce polaire, non recouverte par une spire en court-circuit, vers la deuxième pièce polaire (selon l'alternance des maximums des flux "phases").
Pour augmenter le couple de démarrage du moteur considéré en rapprochant son champ tournant de celui circulaire, utilisez différentes façons: des shunts magnétiques sont installés entre les pièces polaires des pôles adjacents, ce qui renforce le couplage magnétique entre l'enroulement principal et la spire court-circuitée et améliore la forme champ magnétique dans l'entrefer; augmenter l'entrefer sous la pointe non recouverte par la bobine en court-circuit ; utilisez deux ou plusieurs tours court-circuités sur une pointe avec différents angles de couverture. Il existe aussi des moteurs sans spires court-circuitées sur les pôles, mais avec un système magnétique asymétrique : configuration différente pièces polaires individuelles et différents entrefers. De tels moteurs ont un couple de démarrage plus faible que les moteurs à pôles ombrés, mais leur efficacité est supérieure, car ils n'ont pas de pertes de puissance dans les tours court-circuités.
Les conceptions de moteurs à pôles ombrés considérées sont irréversibles. Pour mettre en œuvre l'inverse dans de tels moteurs, au lieu de tours court-circuités, des bobines sont utilisées B1, B2, B3 et À 4 HEURES(fig. 4.65, v), dont chacun couvre un demi-pôle. En court-circuitant une paire de bobines EN 1 et À 4 HEURES ou EN 2 et À 3, il est possible de blinder l'une ou l'autre moitié du pôle et ainsi changer le sens de rotation du champ magnétique et du rotor.
Un moteur à pôles ombragés présente un certain nombre d'inconvénients importants : un encombrement et un poids relativement importants ; faible cos φ ≈ 0,4 0,6 ; faible rendement η = 0,25 0,4 en raison de pertes importantes dans une boucle en court-circuit ; petit couple de démarrage, etc. Les avantages du moteur sont la simplicité de conception et, par conséquent, une grande fiabilité de fonctionnement. En raison de l'absence de dents sur le stator, le bruit du moteur est négligeable, il est donc souvent utilisé dans les appareils de reproduction de la musique et de la parole.
Dans la vie quotidienne et dans la technologie, où des moteurs de faible puissance sont nécessaires, on utilise souvent des moteurs asynchrones monophasés. Un moteur monophasé diffère d'un moteur triphasé par le fait que son stator possède un enroulement (parfois deux) et est alimenté par un réseau monophasé. Le rotor de ces moteurs, en raison de leur faible puissance, est toujours court-circuité sous la forme d'une roue d'écureuil et n'est pas différent du rotor d'un moteur triphasé.
Si le bobinage d'un moteur monophasé est connecté au réseau, le courant alternatif qui le traverse excitera dans la machine, alors que son rotor est fixe, un champ magnétique alternatif dont l'axe est également fixe. Ce champ induira des courants dans l'enroulement du rotor, dont l'interaction avec le champ magnétique entraînera l'apparition de forces dirigées de manière opposée dans les moitiés droite et gauche du rotor, à la suite desquelles le couple résultant agissant sur le rotor sera être égal à zéro. Par conséquent, en présence d'un enroulement, le couple de démarrage initial d'un moteur monophasé
est égal à zéro, c'est-à-dire qu'un tel moteur ne pourra pas se déplacer tout seul. Cependant, si, avec l'aide d'une force externe, le rotor est informé d'une certaine vitesse de rotation, alors il commencera à tourner.
Les moteurs monophasés sont démarrés à l'aide de l'un ou l'autre dispositif de démarrage. Le fonctionnement de ces dispositifs repose sur l'utilisation de la propriété de deux flux magnétiques, déplacés dans l'espace de 90° et déphasés de pi/2, pour créer un champ magnétique tournant.
8.8.1. Moteurs monophasés avec bobinage de démarrage
Sur le stator d'un tel moteur, sauf enroulement de travail RO est le soi-disant démarrage du logiciel de bobinage, tourné dans l'espace par rapport à l'enroulement de travail de 90 ° (Fig.
Au moment du démarrage, le bobinage de démarrage est fermé par le bouton À,et en à la suite du couplage du transformateur, un courant y apparaît qui est déphasé par rapport au courant d'alimentation de presque pi / 2. Ces courants créent un champ magnétique tournant qui accélère le rotor. Après l'accélération, l'enroulement de démarrage s'ouvre et ne participe pas au fonctionnement ultérieur du moteur. Les moteurs avec un tel démarrage se trouvent parfois dans les ménages machines à laver.
8.8.2. Moteurs à condensateur
Dans ces moteurs, les enroulements de travail et de démarrage du stator sont également décalés sur le stator l'un par rapport à l'autre de 90 °. Au démarrage, le bobinage de démarrage du logiciel est connecté au réseau à l'aide du bouton À par condensateur AVEC(Fig. 8.15), en raison de laquelle le courant dans l'enroulement de démarrage diffère en phase du courant dans l'enroulement de travail de pi / 2, ce qui assure l'accélération du rotor. 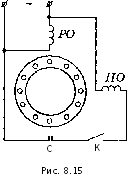
Certains moteurs utilisent deux condensateurs parallèles C1 et AVEC 2 - les deux sont utilisés lorsque
lancer, et l'un d'eux (AVEC 2 ) reste allumé pendant
travail du moteur, grâce auquel les deux enroulements fonctionnent (Fig. 8.16).
Les moteurs à condensateur ont de meilleures caractéristiques de démarrage et de performance que les autres moteurs monophasés, c'est pourquoi ils sont les plus utilisés. 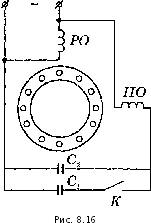
8.8.3. Moteurs monophasés à pôles ombragés

le courant est en phase avec l'EMF et est en retard par rapport au flux d'enroulement également de pi / 2.
Ce courant dans l'anneau crée son propre flux magnétique, qui coïncide avec lui en phase. Ainsi, sous le pôle se trouvent deux flux magnétiques déphasés de pi/2, formant un champ magnétique tournant. C'est ce champ magnétique qui entraîne le rotor à cage d'écureuil.
Les moteurs à pôles ombragés sont largement utilisés pour les variateurs de faible puissance (projecteurs de cinéma, ventilateurs, etc.).
Inclusion de moteurs triphasés dans un réseau monophasé
Dans de nombreux cas, les moteurs asynchrones triphasés peuvent être connectés à un réseau AC monophasé. 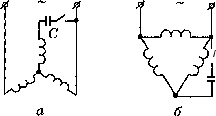
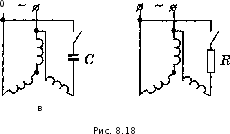
En figue. 8.18, un, b montre les circuits de commutation des moteurs triphasés, dans lesquels seules trois extrémités des enroulements sont sorties. Condensateur AVEC crée un déphasage supplémentaire
entre courant et tension fournir lanceur initial moment. La valeur de ce condensateur est calculée ou choisie de manière à assurer l'égalité approximative des trois courants de phase. En figue. 8,18 pouces, g montre les circuits de commutation des moteurs asynchrones triphasés, dans lesquels les six extrémités de l'enroulement du stator sont sorties. L'inclusion de moteurs triphasés dans un réseau monophasé permet de n'en recevoir que 40 à 50 % de leur puissance nominale en mode triphasé.
– Il s'agit d'un moteur de faible puissance (jusqu'à 1500 W), qui est utilisé dans les installations dans lesquelles il n'y a pratiquement aucune charge sur l'arbre au moment du démarrage, ainsi que dans les cas où le moteur ne peut être alimenté qu'à partir de un réseau monophasé. Le plus souvent, ces moteurs sont utilisés dans les machines à laver, les petits ventilateurs, etc.
Un moteur monophasé a une structure similaire à un moteur asynchrone triphasé, la différence est le nombre d'enroulements de phase, dans un monophasé non pas trois, mais deux enroulements - lanceur et travail, et un seul enroulement fonctionne constamment - celui qui fonctionne.
Pour que le rotor d'un moteur à induction se déplace, l'enroulement du stator doit créer un champ magnétique tournant. Dans un moteur triphasé, ce champ est généré par l'enroulement triphasé. Mais l'enroulement de travail d'un moteur monophasé ne crée pas un champ magnétique tournant, mais pulsé. Ce champ peut être décomposé en deux - en avant et en arrière... Le champ direct tourne à une vitesse synchrone n 1 dans le sens de rotation du rotor et crée le moment électromagnétique principal. Le glissement du rotor par rapport au champ direct est
Champ inversé, tourne contre le rotor, donc la vitesse du rotor est négative, par rapport à ce champ
Chaque champ induit une CEM, en raison de laquelle des courants commencent à circuler dans le rotor. Les fréquences de ces courants sont proportionnelles au glissement (ft = fs), et à partir des formules dérivées ci-dessus, on peut conclure que la fréquence du courant induit par le champ inverse est beaucoup plus élevée que la fréquence du courant de l'avant champ. En raison de ce, réactance inductive, qui augmente avec l'augmentation de la fréquence, devient très importante et devient une résistance beaucoup plus active. Par conséquent, le courant de champ inverse est pratiquement inductif et a un effet démagnétisant sur le flux de champ magnétique inverse. En conséquence, le moment créé par ce champ est faible et dirigé contre la rotation du rotor.
![]()
Au moment où le rotor est immobile, l'axe de symétrie entre ces deux champs est également immobile, ce qui signifie qu'aucun champ magnétique tournant n'est créé, et par conséquent, le moteur ne fonctionne pas. Pour le mettre en mouvement, vous devez tourner le rotor afin que l'axe de symétrie se déplace. Mais cela n'a aucun sens de le faire mécaniquement, donc, pour démarrer un moteur monophasé, ils ont créé démarrage du bobinage... L'enroulement de démarrage, avec l'enroulement de travail, crée un champ magnétique tournant nécessaire au démarrage du moteur. Pour cela, il faut que les MDS des deux enroulements soient égaux et que l'angle entre eux soit de 90 °. De plus, il faut que les courants dans ces enroulements soient décalés de 90°. Dans ce cas, le soi-disant champ magnétique circulaire auquel le moment électromagnétique résultant est maximum. Si, toutefois, ces conditions sont remplies avec des écarts, alors un champ magnétique elliptique auquel le couple est plus faible, en raison de l'augmentation du couple de freinage du champ inverse.
Dans des conditions réelles, un moteur monophasé est démarré en appuyant simultanément sur les boutons d'alimentation et en connectant l'enroulement de démarrage au circuit.
Afin de créer un déphasage de 90 ° entre les courants des enroulements de travail et de démarrage, des éléments déphaseurs (FE) sont utilisés. Il peut s'agir d'une résistance active, d'une bobine ou d'un condensateur. Les moteurs monophasés avec résistance active comme élément de déphasage sont largement utilisés. Une augmentation de la résistance de l'enroulement de démarrage est obtenue en réduisant la section du fil, et comme cet enroulement fonctionne pendant une courte période au moment du démarrage, cela ne nuit pas à l'enroulement.

Mais, la résistance active, ainsi qu'inductive, ne crée pas le déplacement requis de 90 ° entre les courants, mais un tel déplacement crée un condensateur. La capacité de ce condensateur est choisie de telle sorte que le courant de l'enroulement de démarrage soit en avance sur la tension en phase d'un certain angle, ce qui est nécessaire pour que le déplacement entre les courants devienne 90 °. Cela crée un champ magnétique circulaire. Mais, les condensateurs sont moins souvent utilisés comme élément déphaseur, car pour assurer un mélange à 90°, il faut un condensateur, de grande capacité, et, en règle générale, d'une tension relativement élevée. De plus, les dimensions de ce condensateur sont importantes, ce qui joue également un rôle.
Entrées associées :
 Voyage indépendant en Islande : tarifs et itinéraire
Voyage indépendant en Islande : tarifs et itinéraire
 À faire et à ne pas faire en Thaïlande : règles de conduite en Thaïlande
À faire et à ne pas faire en Thaïlande : règles de conduite en Thaïlande
 Voyages de pêche en Mongolie
Voyages de pêche en Mongolie
 Quelle quantité d'alcool peut être exportée de la République tchèque - caractéristiques, exigences et recommandations
Quelle quantité d'alcool peut être exportée de la République tchèque - caractéristiques, exigences et recommandations
 Comment un touriste russe doit-il se comporter dans ce pays ?
Comment un touriste russe doit-il se comporter dans ce pays ?





