Настройка регулятора температуры. Контроль обратной связи. Ослабление влияния шумов измерений
1. Перевести регулятор в ручной режим, дождаться пока стабилизируется процесс и произвести однократное изменение выходного сигнала (выхода на клапан) X, которое обеспечит приемлемый отклик переменной технологического процесса Y (рисунок.1).
2. После получения отклика вернуться к исходному значению выходного параметра сигнала регулятора. Переменная технологического процесса также должна вернуться к исходному значению. Если различие значительно, повторите попытку отклика.
3. Определить коэффициент усиления процесса (Kp=Y/X), время запаздывания d, и временную константу Т усреднением значений верхнего и нижнего откликов.
4. Рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 1.
5. Для более устойчивой работы регулятора возможно необходимо будет увеличить временную константу замкнутого контура (E).
Регуляторы температуры - Основные понятия
Кроме того, контроллеры температуры могут быть оснащены. Дополнительный выход тревоги, дополнительный управляющий выход, ретрансляционный выход, двоичные входы для управления контроллером, дистанционный опорный вход, например, каскадное управление. Управляющий выход: это основной выход, используемый для управления исполнительными механизмами, ответственными за процесс настройки. В зависимости от требуемого управляющего сигнала доступны следующие типы выходных сигналов.
Основной функцией этого типа выхода является включение или выключение электромагнитных реле. При малых токах нагрузки нагрузку можно переключать напрямую через встроенный контроллер реле. Принимая во внимание срок службы контактов встроенного реле, рекомендуется установить пропорциональный цикл в мин. 30 секунд. Если скорость процесса настройки больше этого, функция автонастройки может не улучшить результат настройки. Чтобы получить желаемый корректирующий эффект, постоянная времени процесса должна быть меньше упомянутого выше значения.
Рисунок 1. Отклик процесса на ступенчатое воздействие.
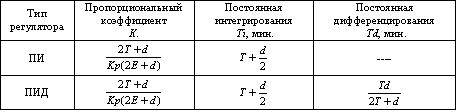
Таблица 1. Формулы вычисления коэффициентов для ПИД регуляторов
Где: Х – значение изменения выходного воздействия (в %);
Y – значение изменения переменной процесса (в % от шкалы);
Kp – коэффициент усиления процесса;
d – время запаздывания реакции процесса (в минутах);
Т – временная константа процесса (в минутах);
E – заданная временная константа замкнутого контура (минуты). Минимально возможное время в течении которого настраиваемый регулятор может привести значение переменной процесса к заданию.
Преимущества: Это самый экономически выгодный тип выхода, он позволяет переключать большие токи. Выход логического напряжения: предназначен для управления полупроводниковыми реле. Он используется в большинстве процессов контроля температуры, потому что время жизни контактов не ограничено и цикл пропорциональности может быть сужен. Для уменьшения помех рекомендуется использовать твердотельные реле. Заводское значение пропорционального цикла для этого выхода составляет 3 секунды. Да, поэтому, если цикл пропорциональности установлен менее чем на 3 секунды, результат настройки может ухудшиться.
Kp=Y/X
E=T+d
Для более устойчивой работы регулятора значение E нужно увеличить.
При настройке каскадных регуляторов, сначала настраивается ведомый регулятор, затем ведущий регулятор. Причем, временная константа E ведущего регулятора должна быть больше временной константы E ведомого регулятора минимум в 5 раз.
Настройка ПИД регулятора по методу максимального коэффициента усиления (Метод №2).
1. Переключите регулятор в ручной режим работы, когда процесс достаточно стабилен и на установке не ожидается резких отклонений от заданного режима. Установите Td (постоянную дифференцирования регулятора) и K (пропорциональный коэффициент регулятора) в значение равное нулю, а Ti (постоянную интегрирования регулятора) на максимальное значение.
2. Запомните исходное положение клапана на тот случай, если вам потребуется вернуться к нему в процессе настройки. Переключите регулятор в автоматический режим.
3. Постепенно увеличивайте значение пропорционального коэффициента до тех пор, пока не начнутся колебания. Нужно добиться, чтобы колебания были с постоянной амплитудой. Если колебания будут с возрастающей амплитудой, то пропорциональный коэффициент нужно уменьшить. При сильной раскачке необходимо перевести регулятор в ручной режим, выставить запомненное ране в пункте 2 значение выхода на клапан, уменьшить пропорциональный коэффициент и повторить попытку. Когда получатся равномерные колебания, замерьте период колебания tc (время отработки одного полного цикла)(см. рисунок 2). Получившийся пропорциональный коэффициент будет максимальным для данной системы регулирования (Kmax).
4. По полученным tc и Kmax, рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 2.
Токовый выход чаще всего используется для управления приводами, такими как тиристорные регуляторы мощности, сервоприводы, регулирующие клапаны и демпферы, инверторы. Выход напряжения имеет аналогичные функции и используется в качестве токового выхода.
Выход с открытым коллектором: этот выход имеет коллектор транзисторного выхода непосредственно на выходные клеммы. Выход необходим для внешнего источника питания и электромагнитного реле. Если один из контактов активирован, сервомотор клапана вращается вперед или назад, т.е. клапан открывается или закрывается. Некоторым регуляторам требуется подключение к потенциометру регулирующего клапана. Клапан обратной связи информирует регулятор о текущем положении клапана. Существуют также элементы управления, которые не требуют подключения потенциометра в качестве обратной связи.

Рисунок 2. Определение периода колебаний

Таблица 2.Формулы вычисления коэффициентов для ПИД регуляторов
Общие правила для настройки регуляторов:
Регулятор не будет нормально работать, если клапан почти полностью закрыт или почти полностью открыт.
Настраивать регулятор нужно в той зоне шкалы, предположительно в которой ему предстоит работать.
Не следует использовать воздействие дифференциальной составляющей для регуляторов расхода.
Не следует использовать малые значения интегральной составляющей в регуляторах уровня.
Не следует использовать воздействие дифференциальной составляющей в регуляторах уровня.
После настройки регулятора, необходимо проверить его устойчивость, сменив значение задания на значительную величину. Если будет наблюдаться раскачка, то необходимо уменьшит коэффициент усиления.
Следует помнить о том, что безопасными для устойчивости регулятора, являются большие значения Ti и малые значения Td.
При зашумленных результатах измерений использование дифференциальной составляющей, как правило, невозможно. Ни в коем случае не устанавливайте дифференциальную составляющую, которая превышает интегральную.
При настройке каскадных регуляторов время интегрирования ведущего регулятора должно быть в 4 раза больше чем время интегрирования ведомого регулятора.
Примечание: После настройки регулятора по методу 1 или методу 2, для более точной работы регулятора можно подстроить его коэффициенты опираясь на рисунок 3.
Эти регуляторы имеют функцию для измерения полного времени открытия и закрытия регулирующего клапана. Современные контроллеры температуры и процесса имеют выход, функция которого сконфигурирована и может использоваться как для сигнализации, так и для других событий.
Если выбрано действие тревоги, режим работы выхода будет зависеть от выбранного типа тревоги. В общем случае выход тревоги будет активирован, когда регулируемое значение превысит установленное отклонение или пороговое значение. Для выхода тревоги могут быть выбраны следующие выходы.

Рисунок 3. Графики для уточнения настройки регулятора.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться .
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете .
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования

Этот выход также может использоваться для сигнализации следующих событий: выгорание нагревателя, перерыв в управлении контуром. Он также может использоваться для вывода сигнала времени, выхода выхода программы, выхода таймера. Когда ток течет через нагреватель, провод создает электромагнитное поле, которое затем генерирует напряжение в трансформаторе тока. Сгенерированное напряжение пропорционально току, протекающему через нагреватель. Затем этот ток сравнивается с установленным значением аварийного сигнала выгорания нагревателя.
Общие сведения
Обычно, при использовании пропорционально-интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю. Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
Если ток, протекающий в цепи подачи нагревателя, опускается ниже порогового значения, установленного в пороговом регуляторе, начнется выход тревоги выгорания нагревателя. Управление аварийным контуром. Контроллер температуры активирует аварийный сигнал цикла, когда регулируемое значение не увеличивается в заданное время на заданное значение, даже если максимальный управляющий сигнал остается на выходе. Сигнал тревоги также активируется, когда регулируемое значение не падает в заданное время на заданное значение, даже если выходной сигнал остается на минимальном сигнале управления.
Где:
Xp - полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд - постоянная времени дифференцирования
∆Ei - разность ошибок соседних измерений (Ei - Ei-1)
∆tизм - время между соседними измерениями (ti - t i-1)
Ти - постоянная времени интегрирования
- Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “ ”.
Опционально, контроллеры температуры могут быть оснащены выходным сигналом управления, который является противоположным основному выходному сигналу управления и служит для управления охлаждением. Для охлаждения можно выбрать различные характеристики охлаждения, например, охлаждение воздуха, воды или масла. Работа выходов управления обогревом и охлаждением может перекрываться или может быть разделена. Доступные типы выходов управления охлаждением обычно такие же, как для выходного сигнала нагрева, т.е. реле, логического напряжения и линейного аналогового сигнала.
| Рис. 1 |
 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) - это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp - зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP - Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти - постоянная времени интегрирования.
Тд - постоянная времени дифференцирования.
Текущая мощность - это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность - это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
При желании контроллеры температуры могут быть оснащены линейным аналоговым выходом для повторной передачи измеренного значения, заданного значения, управляющего сигнала или отклонения к другим устройствам. Это позволяет настраивать устройства, контролировать и архивировать процесс регулируемого процесса.
Передача заданного значения цифрового выхода. Регуляторы температуры могут быть оснащены дополнительной функцией передачи цифровых значений. Эта функция позволяет дистанционно управлять несколькими контроллерами с одного места. 
Контроллеры температуры могут быть оснащены дополнительным аналоговым входом для задания дистанционной уставки. Эта опция чаще всего используется для каскадного управления, когда аналоговый управляющий сигнал от одного регулятора является сигналом заданного значения для другого контроллера или когда управляющее значение задается аналоговым сигналом с другого устройства.
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP - это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
Температурные регуляторы могут быть оснащены не имеющими напряжения двоичными входами, предназначенными для дистанционного управления регулятором с помощью логических сигналов. В частности, могут использоваться двоичные входы. чтобы. Этот выход предназначен для питания двухпроводных преобразователей, подключенных к контроллеру. Это позволяет напрямую передавать передатчик, подключенный к контроллеру, например, датчик влажности, датчик давления.
Их настройки выбраны иначе, чем для других процессов. Функции автоматического выбора могут быть полезны, если вы понимаете, как они работают. Это обсуждение призвано объяснить, как работают регуляторы и как начать работу с регуляторами температуры. Мы попытались избежать ненужного жаргона, заменив его простой терминологией и определениями, которые помогут вам изучить документацию устройства. Однако имейте в виду, что так же, как сами процессы, регуляторы разные, и было бы очень безответственно утверждать, что наш опыт охватывает все возможные случаи, и мы, конечно, не ошибаемся.
| Рис. 2 |
 |
Тο - начальная температура в системе;
Тsp - заданная температура (уставка);
∆T - размах колебаний температуры;
∆t - период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
| Рис. 3 |
 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 - 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 - 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Этот тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Если вы решите изменить систему управления, будьте осторожны и учитывайте пессимистические сценарии событий. Эти зависимости имеют свое отражение в настройках. Точные имена параметров регуляторов зависят от производителя, но типичными именами являются: коэффициент пропорциональности, константа интегрирования и дифференциальная константа. Проверьте документацию параметров вашего регулятора. Контроллер не знает правильных значений параметров для процесса, потому что каждый процесс отличается.
Плохо выбранные заданные значения представляют собой колебания температуры вокруг заданного значения, слишком медленный отклик на изменение заданного значения или значительное превышение заданного значения, особенно заметное при изменении шага в заданной температуре - например, на этапе запуска. Влияние регуляторов на производительность является значительным - операторам приходится ждать, снижать производительность, а также производить дефектные продукты.
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
Автор: Джейсон Бейер, Шон Уилкинсон. Тогда аналоговый сигнал, например, 35% входного диапазона, является просто командой для достижения 35% максимальной скорости. Бывает так, что мы не знаем, какая скорость вращения является наиболее подходящей - мы заинтересованы в достижении определенного эффекта, например, в поддержании постоянного давления воды в трубопроводе или обеспечении бесперебойного питания некоторого сырья, поставляемого конвейером. Мы будем использовать обратную связь, т.е. будем измерять физический размер, который нам интересен.
| Рис. 4 |
 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти)
Сумма, преобразованная в стандартизованный электрический сигнал, подается на аналоговый вход инвертора. Теперь это уже не ввод заданного значения, а вход обратной связи. Напротив, значение устанавливается где-то в программе как фиксированное число. Если давление воды ниже требуемого значения, преобразователь достигает 100% от скорости вращения и будет поддерживать его постоянным до тех пор, пока давление не достигнет желаемого значения. Когда давление слишком велико, инвертор будет замедляться или останавливаться.
Как быстро будут эти изменения скорости? Обычно у нас нет автонастройки, но у нас есть метод старинного опыта: Циглер-Николс, ответ на единичный прыжок и, вероятно, некоторые варианты. Это не номинальный размер. Однако самым важным параметром является определение «знака» регулятора - следует ли увеличить сигнал обратной связи, который должен реагировать инвертор, чтобы увеличить или уменьшить скорость. В примере поддержания постоянного запаса силоса в силосе инвертор может управлять силосом - когда уровень должен повышаться медленнее.
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
| Рис. 5 |
 |
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.
Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org










